Informed_machine_learning
Informed Machine Learning 逐篇精读、逻辑关系与渐进式复现路线
0. 这份文档怎么用
这份文档不是简单摘要,而是把当前文件夹里的核心论文整理成一条可执行的学习链。目标有四个:
- 让你知道每篇论文到底在解决什么问题。
- 让你知道它和前后论文的逻辑关系。
- 让你知道每篇论文最值得看的图、公式和关键词。
- 让你知道后续可以怎么做最小复现、标准复现和延伸复现。
阅读建议:
- 第一次看:先读第 1 节和第 2 节,建立全局结构。
- 第二次看:按第 3 节开始一篇篇读。
- 第三次看:直接从每篇后面的“复现建议”开始动手。
说明:
- 每篇论文都配了一张截图,截图来自当前仓库里的 PDF 页面渲染。
- 截图不是为了代替读原文,而是帮你抓住“这篇最值得盯住的图或核心页面”。
- 本文的重点是“结构化理解 + 可执行路线”,不是追求逐段翻译。
1. 先把整套材料看成两条主线
这批论文不是散的,实际上可以分成两条主线,再在后面汇合。
1.1 逻辑约束主线
这条线关心的问题是:
已知一些规则、逻辑、结构约束,怎样把它们注入神经网络,而不是只靠数据硬学?
对应论文:
- Survey
- Logic-net
- Semantic Loss
- DL2
这条线的推进顺序是:
- Survey 先告诉你“知识可以进模型”的大框架。
- Logic-net 先给一个最直观的规则注入思路。
- Semantic Loss 把逻辑约束更直接地写成损失。
- DL2 再把逻辑约束做成一个更系统、可声明、可查询的框架。
1.2 Granular / Uncertainty / Knowledge 主线
这条线关心的问题是:
现实中的知识往往不是严格逻辑公式,而是模糊的、区间式的、带抽象层次的,那么如何把这种知识和数据一起建模?
对应论文:
- Survey
- Granular Computing for Machine Learning
- From Fuzzy Rule-Based Models to Granular Models
- Informed Machine Learning with Knowledge Landmarks
这条线的推进顺序是:
- Survey 先给你知识注入的总框架。
- Granular Computing 说明为什么模型不能只给一个“看起来很精确”的点。
- Fuzzy Rule-Based -> Granular 说明如何从数值模型升级到区间/模糊/概率粒输出。
- Knowledge Landmarks 把“知识注入”和“信息粒表示”真正结合起来。
1.3 旁支:Rough Set / Attribute Reduction
rough_set_attribute_reduction_2025_asoc.pdf 对应的 rough set 论文不属于神经网络逻辑约束主线,但它和下面这些主题是相关的:
- uncertainty measurement
- information granules
- 特征选择 / 属性约简
- 混合数据上的不确定性表达
所以它更像一篇“相关方法论补充”,适合放在主线读完之后再看。
2. 论文之间的逻辑关系,按“上一篇解决了什么,下一篇为什么还需要存在”来理解
2.1 从总纲到逻辑注入
Survey -> Logic-net
- Survey 解决的是“这个领域到底长什么样”。
- 但它不会告诉你“规则到底怎样进神经网络”。
- Logic-net 于是给出第一个非常直观的工程答案:先做一个更守规则的 teacher,再蒸馏给 student。
Logic-net -> Semantic Loss
- Logic-net 的强项是直观、通用、易理解。
- 但规则是通过 teacher 间接传给 student 的。
- Semantic Loss 进一步追问:能不能不绕 teacher,而是直接定义“输出违不违反逻辑”的损失?
Semantic Loss -> DL2
- Semantic Loss 已经很漂亮,但它更偏“输出约束”的逻辑化损失。
- DL2 再往前走一步:不仅训练时可以加逻辑,查询时也可以问模型“什么输入满足某种条件?”
- 于是逻辑约束不再只是 loss 的一部分,而变成一个可编程、可声明的系统。
2.2 从逻辑有效性到可信表达
DL2 -> Granular Computing for ML
- DL2 非常强,但它主要处理的是“约束满足”。
- Granular Computing 提出另一个维度:即使模型满足约束,它的输出是否仍然过于“精确而自信”?
- 所以这一步开始从“正确性”扩展到“可信度、抽象层次、解释性”。
Granular Computing -> Fuzzy Rule-Based to Granular Models
- Granular Computing 是大的思想框架。
- 但如果只停在概念层,无法直接做模型。
- Fuzzy Rule-Based -> Granular 就把这个思想具体落到规则模型里:原来输出一个数,现在输出区间、模糊集或概率粒。
Fuzzy Rule-Based -> Knowledge Landmarks
- 前一篇解决的是“输出怎么更可信”。
- 但现实里更常见的问题是:数据是局部的,专家知识是全局的、模糊的、分区域的。
- Knowledge Landmarks 恰好就是把这种“模糊但有结构的知识”做成输入输出信息粒,用 regularizer 注入模型。
2.3 Rough Set 旁支怎么放
Granular Computing / Knowledge Landmarks -> Rough Set
- rough set 不是这条主线上的下一步。
- 但它同样强调:不确定性、粒化表示、类别边界、属性约简。
- 所以它更适合被理解为“数据预处理和不确定性建模的一条补充路线”。
3. 总览表:每篇论文应该怎样定位
| 顺序 | 论文 | 核心问题 | 知识表示 | 注入位置 | 当前仓库资源 | 推荐动作 |
|---|---|---|---|---|---|---|
| 1 | Survey | informed ML 到底是什么 | taxonomy | 全流程 | PDF, TXT | 先建立地图 |
| 2 | Logic-net | 规则怎样进入 DNN | soft logic / rule distillation | 训练阶段 | PDF, TXT | 做最小 toy |
| 3 | Semantic Loss | 逻辑如何直接变成 loss | propositional logic | 输出层 / loss | PDF, TXT | 做 exactly-one 复现 |
| 4 | DL2 | 如何把逻辑做成系统 | declarative constraints | 训练 + 查询 | PDF, TXT, Code | 先读代码再做 toy |
| 5 | Granular Computing for ML | 为什么需要粒化表达 | intervals / fuzzy / probabilistic granules | 数据层 + 模型层 + 知识层 | PDF, TXT | 建立第二条主线 |
| 6 | From Fuzzy Rule-Based Models to Granular Models | 如何从数值规则模型升级到粒化模型 | interval / fuzzy / probabilistic granules | 模型输出层 | PDF, TXT | 做区间输出 toy |
| 7 | Knowledge Landmarks | 局部数据 + 全局模糊知识如何联合建模 | input-output granule landmarks | 增强损失 regularizer | 很适合后续自己延展 | |
| 8 | Rough Set / Attribute Reduction | 混合数据下不确定性度量和约简 | KNN-neighbourhood rough set | 预处理 / 约简 | PDF, TXT | 放在第二阶段 |
4. 逐篇精读
4.1 Informed Machine Learning: A Taxonomy and Survey of Integrating Prior Knowledge into Learning Systems
文件位置
这篇的角色
这篇是总纲,是地图,不是武器本身。
如果你没有先读它,后面每篇都会像孤立技巧;如果你先读了它,后面的论文都会自动落到一个清楚的坐标系里。
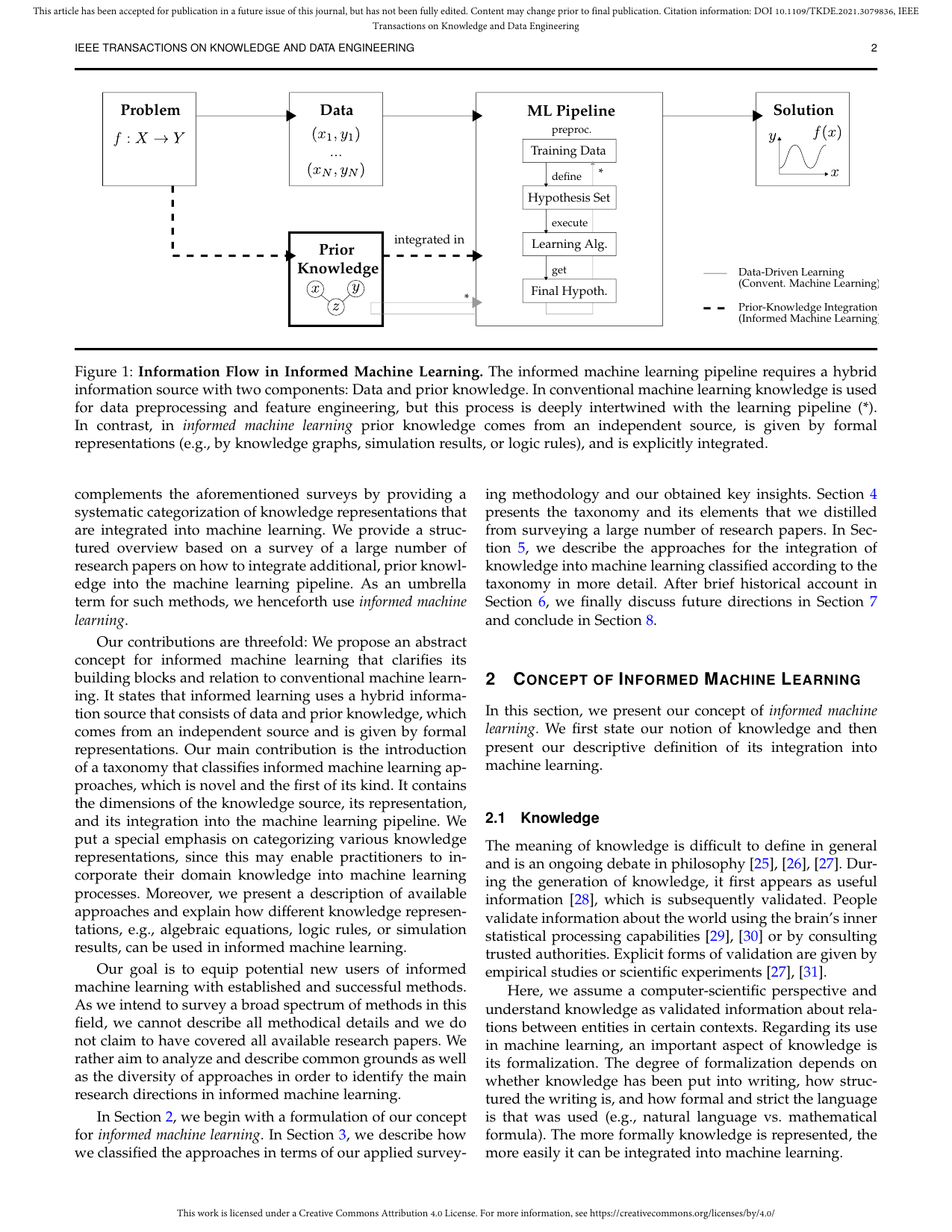
截图解析:这里最值得看的不是正文,而是 Figure 1。它把 informed machine learning 和 conventional machine learning 的差别直接画出来了。重点是“Prior Knowledge”来自独立信息源,并被显式地集成到学习流程里。
4.1.1 它到底在解决什么问题
这篇论文想回答的是:
当数据不够、规则不能违反、或者模型需要更可解释时,单纯的数据驱动学习不够,那么如何系统地讨论“知识进入机器学习”?
它指出:
- 机器学习不只是样本数量问题。
- 很多场景里,我们明明已经知道一些知识,只是没有把它显式利用起来。
- 这些知识可以是逻辑、方程、模拟结果、知识图谱、专家经验等。
4.1.2 最核心的结构:三维 taxonomy
这篇最重要的不是某个具体案例,而是 taxonomy 的三个维度:
- 知识来源是什么
- 专家知识
- 科学知识
- 世界知识
- 知识如何表示
- 逻辑规则
- 代数方程
- 模拟结果
- 图结构
- 其他形式化表示
- 知识注入到哪里
- 数据层
- 模型结构
- 训练目标 / loss
- 输出后处理
4.1.3 这篇论文真正帮你建立了什么能力
它帮你建立的,不是一个算法,而是一种“分类和比较论文”的能力。
读完后你应该能做这件事:
- 看到一篇新论文,先不急着看公式。
- 先问:知识来自哪里?怎么表示?加在哪里?
- 然后再判断它与已有方法的关系。
这会直接决定你后面和博导、师兄讨论时是否显得条理清楚。
4.1.4 和后续论文的关系
这篇论文是后面所有论文的共同母图。
- Logic-net / Semantic Loss / DL2 都属于“逻辑/规则知识进入训练或查询”的分支。
- Granular Computing / Fuzzy Granular / Knowledge Landmarks 都属于“粒化知识、抽象表达和可信输出”的分支。
- rough set 论文则更靠近“不确定性与数据粒化处理”。
4.1.5 你读这篇时最该盯住的内容
- Figure 1 的信息流
- taxonomy 的三维结构
- “prior knowledge 必须来自相对独立的信息源”这个判断
4.1.6 潜在复现
这篇不适合直接做算法复现,但非常适合做“结构复现”:
最小复现
- 建一张你自己的 taxonomy 表。
- 把当前文件夹里的所有论文填进去。
标准复现
- 选 3 篇来自不同注入位置的论文。
- 做一个“同一任务、不同知识注入方式”的对照展示。
更高价值的延展
- 以后你自己的论文,也可以先用这套 taxonomy 定位。
- 这会让你的工作在开头就显得结构清楚。
4.2 Harnessing Deep Neural Networks with Logic Rules
文件位置
这篇的角色
这是逻辑规则进入神经网络最直观的入口。
如果你只想先抓到“规则注入”的第一感觉,那这篇比 Semantic Loss 和 DL2 都更容易上手。
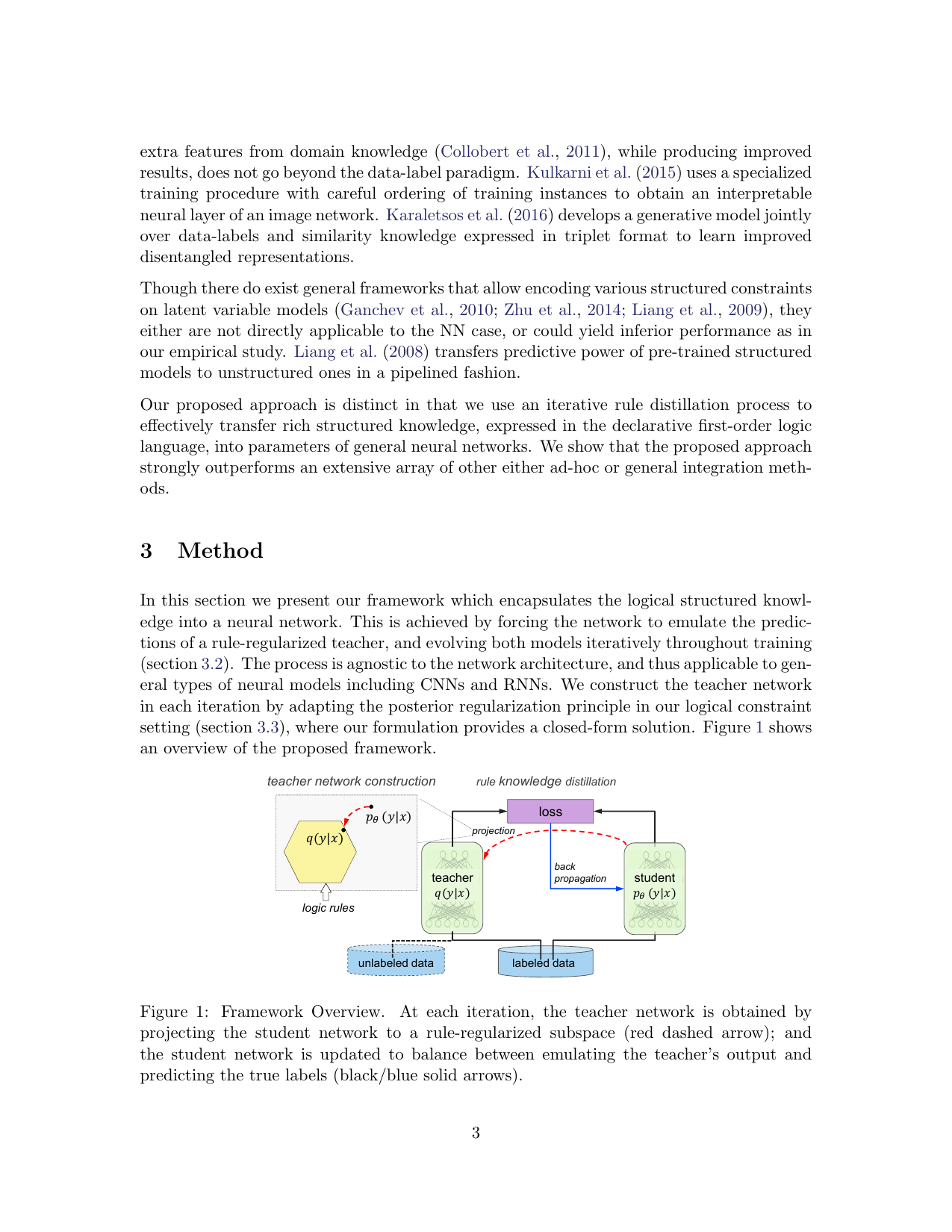
| *截图解析:这页最重要。图中最关键的关系是“logic rules -> teacher q(y | x) -> student p(y | x)”。teacher 不是最终模型,而是把规则转成一个更守规则的中间监督信号。* |
4.2.1 它到底在解决什么问题
这篇关心的是:
已有的神经网络很灵活,但不容易显式吸收高层规则;那么能否不改网络主体,而把规则通过训练过程注进去?
它的回答不是“把规则硬编码到网络结构里”,而是:
- 构造一个 rule-regularized teacher
- 再让 student 在真实标签和 teacher 输出之间学习
4.2.2 核心方法,必须看懂的三层逻辑
第一层:student 网络先给出当前预测。
第二层:利用 posterior regularization,把逻辑规则投影到一个更守规则的 teacher 分布上。
第三层:student 去模仿这个 teacher,同时也继续拟合原始标签。
可以把它压缩成下面这个训练思想:
L = (1 - pi) * L_label + pi * L_teacher
这里最重要的不是公式本身,而是:
L_label保证模型不脱离原始任务。L_teacher让模型逐渐学会规则诱导的结构。
4.2.3 这篇论文最有价值的直觉
它真正教你的不是一个公式,而是一个思想:
规则不一定要直接写到网络里,也可以先变成一个更“守规矩”的老师,再由学生网络吸收。
这对初学者很重要,因为它把“规则注入”从抽象概念,变成一个很能想象的训练过程。
4.2.4 实验上它想说明什么
论文里把这个框架用在:
- sentiment analysis
- named entity recognition
核心结论不是某个具体百分点,而是:
- 即使只加少量直观规则,也能明显帮助模型。
- 规则尤其在标注少、结构强的任务里更有价值。
4.2.5 它和前后论文的关系
相对 Survey
- Survey 讲“知识可以注入”。
- 这篇开始讲“一个具体的注入套路是什么”。
相对 Semantic Loss
- 这篇是间接注入。
- Semantic Loss 则追求更直接的逻辑损失化。
相对 DL2
- 这篇更像一个直观方法。
- DL2 更像一个系统化平台。
4.2.6 这篇的局限
- 规则进入模型的路径是间接的。
- 最后 student 学到的是 teacher 分布,不是直接对逻辑公式本身做零违约优化。
- 当规则很复杂时,teacher 构造和训练过程会变得不够简洁。
4.2.7 潜在复现
最小复现
做一个二维 toy classification:
- 输入是二维点
- 基础标签来自一个简单分类边界
- 再加一条人为规则,例如 “x1 > x2 时更倾向于类别 1”
- baseline 用 MLP
- 再做一个 teacher-student 版本
- 比较少量标注条件下的效果
标准复现
- 用文本或序列任务做一个更贴近原文的小规模版本
- 对比是否加入规则蒸馏
仓库现状
- 当前仓库没有对应的本地官方代码
- 所以最适合先做 toy reproduction,而不是一开始追全文实验
汇报价值
这篇很适合拿来向导师和师兄解释:
- 我已经理解了“规则如何进入训练”的第一代范式
- 我不只是看概念,而是能把它还原成 teacher-student 机制
4.3 A Semantic Loss Function for Deep Learning with Symbolic Knowledge
文件位置
这篇的角色
这篇是逻辑约束路线里最“干净”的一篇。
如果说 Logic-net 教你“规则可以通过老师传给学生”,那这篇教你的就是:
规则本身可以直接定义成一个损失函数。

截图解析:图里列出了三类典型输出结构:one-hot、preference ranking、path in graph。作者想说明 semantic loss 不是只管简单分类,它本质上是在约束输出空间的结构。
4.3.1 它到底在解决什么问题
它要解决的核心问题是:
如果我们已经知道输出必须满足某个逻辑结构,那么能不能直接度量“当前输出到底离这个结构有多远”?
作者的回答是:
- 定义一个 semantic loss
- 它衡量模型输出分布在“满足逻辑约束的世界”上到底放了多少概率质量
4.3.2 最核心的数学直觉
它的核心式子可以记成:
L_s(alpha, p) = - log [满足 alpha 的所有赋值的概率质量之和]
直观理解:
- 如果模型把高概率都放在满足约束的那些输出上,loss 就小。
- 如果模型把概率分散到大量不满足约束的输出上,loss 就大。
这篇最漂亮的地方就在这里:
- 逻辑意义没有被简单替换成一个启发式惩罚
- 它仍然在尽量保留“满足/不满足”的真实语义
4.3.3 这篇真正比 Logic-net 多做了什么
Logic-net 里,规则是间接通过 teacher 进入 student。
Semantic Loss 里,规则直接变成 loss。
所以两篇最大的区别是:
- Logic-net 更像“规则蒸馏”
- Semantic Loss 更像“规则语义的直接损失化”
4.3.4 为什么这篇很重要
因为它教你建立一个很关键的思维方式:
如果知识能定义“哪些输出结构是合法的”,那它就有机会转成 differentiable objective。
这件事会直接帮你理解后面的 DL2。
4.3.5 实验层面它想证明什么
论文里不只是讨论简单分类,还讨论了:
- semi-supervised classification
- ranking
- path prediction
这说明它的目标不是让分类多一点点 accuracy,而是让模型学会尊重结构化输出空间。
4.3.6 它和前后论文的关系
相对 Logic-net
- Logic-net 先让你接受“规则可以影响训练”
- Semantic Loss 让你接受“规则可以直接变成 loss”
相对 DL2
- Semantic Loss 很优雅,但更偏某类输出约束
- DL2 更进一步追求约束语言、查询能力和系统化实现
4.3.7 它的局限
- 当逻辑约束很复杂时,计算 satisfying assignments 可能变重
- 它更自然地作用在输出结构上,而不是完整的神经网络内部约束语言
4.3.8 潜在复现
最小复现
从 exactly-one constraint 开始最合适:
- 做一个简单多分类器
- 减少标注数据
- 给无标签样本加入 exactly-one semantic loss
- 观察分类置信度与效果变化
标准复现
- 做一个小型 structured output 任务
- 比如简单路径、简单排序
更进一步的延展
- 对比 Logic-net 与 Semantic Loss 在同一个 toy task 上的差异
- 你会更清楚“蒸馏式规则注入”和“直接语义损失”之间的不同
仓库现状
- 当前仓库没有现成的对应代码
- 但这篇做 toy reproduction 的门槛不高,适合你自己写
4.4 DL2: Training and Querying Neural Networks with Logic
文件位置
这篇的角色
这篇是逻辑约束路线里最适合你进一步接代码的论文。
因为它不只是提出一个 loss,而是把“约束 + 神经网络”做成了一个系统。

截图解析:这页展示了 DL2 的 querying 视角。它不只是训练模型满足约束,还能反过来问“什么输入会让两个网络输出不同”、“什么输入会激活某种行为”。这就是它比前两篇更像系统而不是单点方法的原因。
4.4.1 它到底在解决什么问题
它想解决两个问题:
- 如何用逻辑约束训练神经网络?
- 如何查询神经网络,寻找满足某些逻辑条件的输入?
这个“querying”很关键,因为它把逻辑从训练阶段扩展到了模型分析阶段。
4.4.2 DL2 最核心的思想
DL2 把逻辑约束翻译成一个非负损失,并希望它满足两个关键性质:
- 当且仅当约束满足时,loss 为 0
- loss 几乎处处可微
这两个性质一旦成立,就能用标准梯度方法训练或搜索。
你可以把它理解为:
先用逻辑写约束,再自动编译成可以优化的目标。
4.4.3 这篇和 Semantic Loss 的本质差异
Semantic Loss 更像“为某类输出逻辑约束定义一个漂亮的 loss”。
DL2 更像“给你一个约束语言,让你可以写很多种逻辑条件,然后系统自动把它们转成 loss”。
所以 DL2 的重点是:
- 更通用
- 更工程化
- 还能做 querying
4.4.4 为什么它对你特别重要
因为当前仓库里已经有对应代码:
dl2-master/dl2-master/dl2libtrainingquerying
这意味着你不必停留在“看懂论文”,而可以继续往:
- 跑 toy query
- 跑 toy training
- 读 DSL / API
- 看官方样例
这条路径对后面给导师、师兄展示代码尤其有价值。
4.4.5 读这篇时必须抓住的三个点
- 约束语言
- 这是它的核心卖点之一
- 你不是手写一个临时惩罚,而是在声明一个逻辑条件
- 训练与查询双重用途
- 训练:让模型更满足知识
- 查询:探索模型输入-输出行为
- 系统化而不是单公式
- 这篇最重要的不是某一个式子
- 而是整个设计范式
4.4.6 实验层面它想说明什么
论文覆盖了:
- unsupervised
- semi-supervised
- supervised
- querying
这说明作者不是把 DL2 限定为某个窄场景,而是想把它做成一个广义框架。
4.4.7 它和前后论文的关系
相对 Semantic Loss
- Semantic Loss 更偏“输出逻辑一致性”
- DL2 更偏“可声明逻辑系统”
相对 Granular 方向
- DL2 主要处理精确可写的逻辑约束
- Granular 方向则开始处理模糊知识、抽象层次和可信区间
4.4.8 潜在复现
最小复现
先不要碰完整论文实验,先做这三步:
- 读本地
README - 跑一个最小 query case
- 再做一个最小 training constraint case
标准复现
- 基于本地
querying/run.py或training/*/main.py - 选一条最轻量的实验路径跑通
更高价值的延展
- 自己写一个小型 PyTorch 网络
- 用 DL2 API 接一个你自定义的约束
难点
- 依赖和数据可能较重
- 论文实验不适合一上来全复现
推荐顺序
先 toy,再读 dl2lib,最后再看是否需要跑原论文例子。
4.5 Granular Computing for Machine Learning: Pursuing New Development Horizons
文件位置
这篇的角色
这是第二条主线的总纲。
如果说前面三篇主要在问“模型有没有遵守规则”,这篇开始问的是:
模型给出的结果是否表达了合适的抽象层次、可信度和知识-数据协同关系?
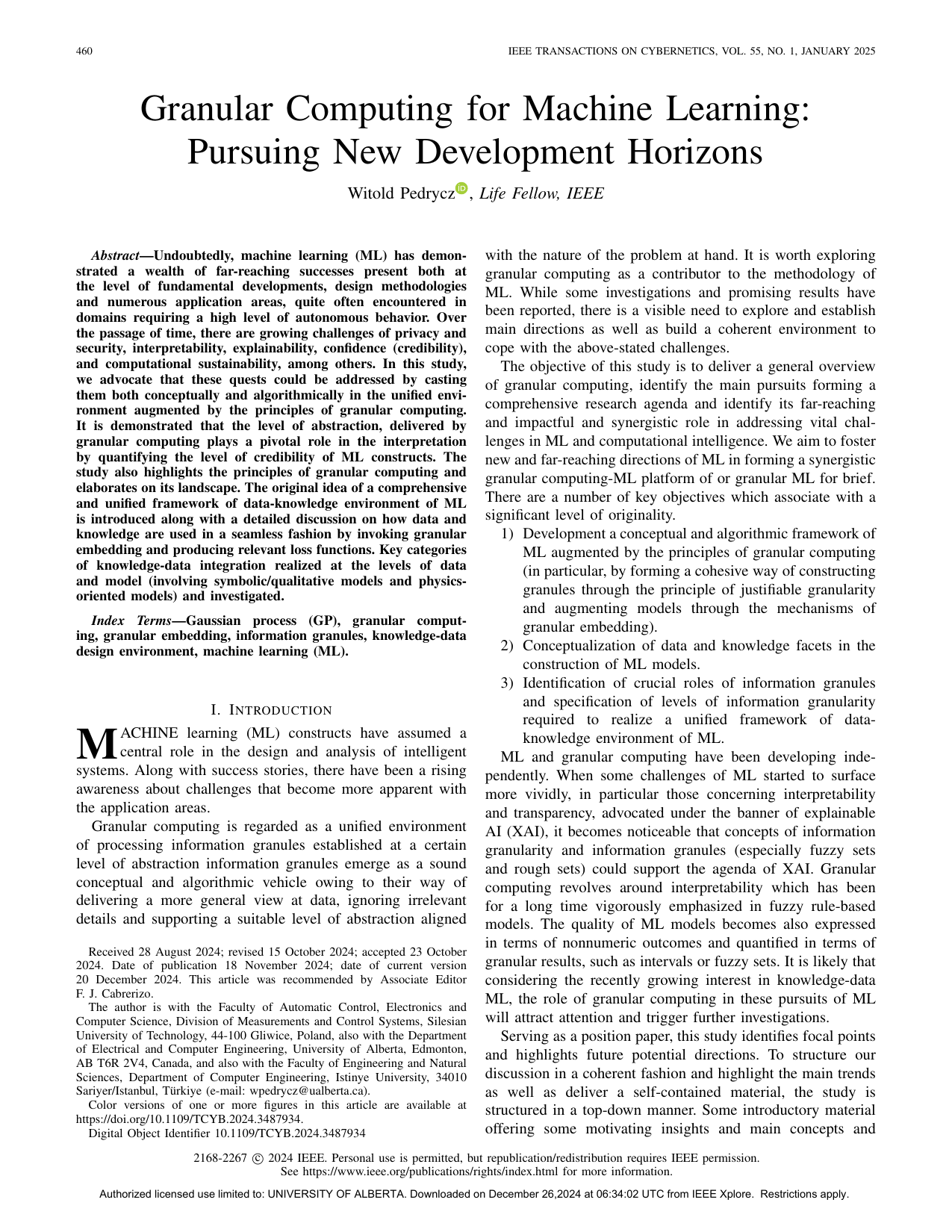
截图解析:这页的价值在摘要和导言。它明确把 granular computing 与隐私、安全、解释性、可信度、可持续计算联系起来,不再只盯着 accuracy。它实际上是在给后面的 granular / knowledge-data 方向搭理论舞台。
4.5.1 它到底在解决什么问题
这篇提出的核心判断是:
机器学习模型输出一个数值,不代表这个数值就值得信任。
现实中的很多问题需要的不是一个“尖锐的点预测”,而是:
- 一个带可信范围的结果
- 一个处在某种抽象层次上的表达
- 一个能与知识协同工作的表示方式
4.5.2 这篇最重要的概念
- information granule
- 可以是区间、模糊集、rough set、概率粒等
- 它本质上是一种抽象表达
- information granularity
- 不同问题需要不同粒度
- 太细和太粗都可能不合适
- principle of justifiable granularity
- 粒度不是越大越好或越小越好
- 要在覆盖性和特异性之间平衡
- granular embedding
- 把粒化知识、粒化表示嵌入到机器学习模型中
4.5.3 为什么这篇和前面逻辑论文不同
前面三篇的关键词是:
- rule satisfaction
- logical validity
- differentiable constraints
这篇的关键词则变成:
- abstraction
- credibility
- uncertainty
- knowledge-data integration
所以它不是逻辑线的替代,而是把 informed ML 从“约束满足”扩到“可信表达”。
4.5.4 这篇最值得抓住的收获
读完这篇你应该形成的判断是:
- 不是所有知识都适合写成硬逻辑。
- 不是所有输出都应该是点值。
- 抽象和粒化不是“信息丢失”,而是更贴合复杂现实的一种表达。
4.5.5 和后续论文的关系
相对 Fuzzy Rule-Based -> Granular
- 这篇给你大思想
- 下一篇给你具体模型形态
相对 Knowledge Landmarks
- 这篇说明为什么要用粒化知识
- 后者说明如何把局部数据和全局粒化知识一起放进 loss
4.5.6 潜在复现
最小复现
做一个简单回归实验:
- baseline 输出点预测
- 扩展版输出一个区间
- 比较哪种更能表达不确定性
标准复现
- 做一个小型 interval / fuzzy prediction 模型
- 加入 coverage 与 specificity 的简单指标
更高价值的延展
- 把 granular 表达和前面的逻辑约束结合
- 例如“输出既要满足规则,又要给出可信范围”
难点
- 这篇偏方向性综述,不是拿来照着复现的
- 它更适合指导你怎么构思自己的研究问题
4.6 From Fuzzy Rule-Based Models to Granular Models
文件位置
这篇的角色
这是 granular 主线里最“可落到模型”的一篇。
它不是只说理念,而是在告诉你:
怎样把原来只输出数值的规则模型,升级为输出区间、模糊集或概率粒的 granular model。
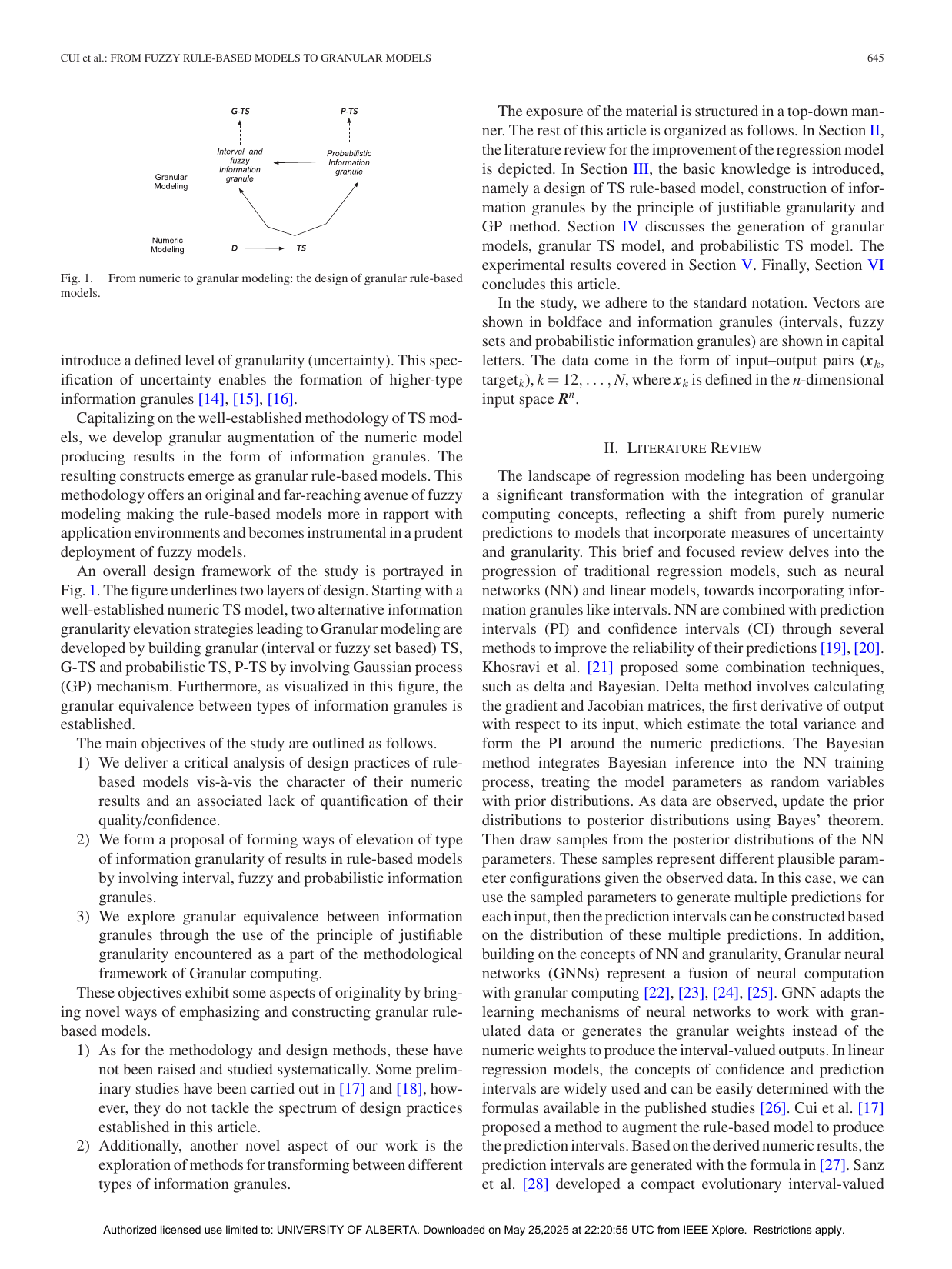
截图解析:Figure 1 很关键。它把“numeric TS model -> granular rule-based model”的升级路线画得很清楚:一条路走向 interval / fuzzy granulation,另一条路走向 probabilistic granulation。你可以把它理解为从点值输出走向带可信结构的输出。
4.6.1 它到底在解决什么问题
作者的出发点非常直接:
一个数值输出看起来很精确,但这种精确往往是幻觉。
传统 Takagi-Sugeno 规则模型输出的是数值。
问题是:
- 数值并不表达置信度
- 在数据稀疏区、噪声区或模型不稳定区,单点输出会误导人
于是作者提出:
- 把结果提升为信息粒
- 让输出带上区间、模糊或概率结构
4.6.2 这篇最核心的概念
- type elevation
- 从 numeric output 升级到 granular output
- G-TS / P-TS
- granular Takagi-Sugeno
- probabilistic Takagi-Sugeno
- justifiable granularity
- 通过 coverage 和 specificity 平衡,决定 granule 应该多宽、多模糊
- granular equivalence
- 讨论不同类型信息粒之间怎样比较、转换、等价
4.6.3 它和上一篇的关系
上一篇问的是:
- 为什么需要 granular computing?
这一篇回答的是:
- 具体怎么把一个规则模型改造为 granular model?
所以这篇是“思想 -> 模型化”的关键一步。
4.6.4 这篇对你最有价值的地方
它会帮你建立一个很实用的研究视角:
预测不一定只能是点值。输出形式本身也可以被设计。
这对后面做自己的实验很重要,因为你不再只盯着“怎么提高准确率”,而会开始考虑:
- 怎么表达可信范围
- 怎么衡量 granule 的质量
- 怎么做 coverage / specificity trade-off
4.6.5 实验层面它在说明什么
论文用 synthetic 和公开数据说明:
- 从 numeric 到 granular 的设计流程是可行的
- 区间、模糊、概率粒都可以作为结果表达
- 输出 granule 能给出更全面的结果质量解释
4.6.6 和后续论文的关系
相对 Knowledge Landmarks
- 这一篇主要在“输出层的粒化”
- Knowledge Landmarks 则进一步变成“知识本身的粒化”和“知识-数据联合 regularization”
4.6.7 潜在复现
最小复现
做一个简单局部加权回归模型:
- baseline 输出单点
- 每个局部规则的 consequent 从标量改为区间
- 最终聚合出一个预测区间
标准复现
- 实现一个简化版 TS 模型
- 分别输出 numeric / interval / probabilistic 结果
- 比较 coverage 与区间宽度
更高价值的延展
- 把 granule 与知识约束联合
- 例如既让输出有区间,又让区间满足某种领域边界
难点
- 全文完整复现涉及规则模型、粒化构造、概率部分
- 对初学者不适合一上来做完整版
4.7 Informed Machine Learning with Knowledge Landmarks
文件位置
这篇的角色
这是当前材料里最值得你后期重点盯住的一篇。
因为它不像传统 physics-informed ML 那样要求你必须有严格方程,而是允许:
- 数据是局部的
- 知识是全局的
- 知识是抽象的、模糊的、粒化的
这很接近很多真实科研场景。

截图解析:这页同时出现了 Figure 1 和增强损失的表达。Figure 1 说明知识 landmarks 覆盖整个输入空间,而数据只覆盖局部区域。公式部分则说明训练目标是“数据项 + 知识 regularizer”的平衡。
4.7.1 它到底在解决什么问题
它瞄准的是一个非常真实的问题:
现实里我们常常只有局部数值数据,但专家又能给出一些全局行为范围、趋势、区域性规律。怎样把这种知识系统地用起来?
传统数据驱动模型的问题是:
- 局部区域拟合可能很好
- 但超出训练数据覆盖区就容易不可靠
而传统 physics-informed ML 又常常要求:
- 明确方程
- 精确物理关系
很多实际问题不满足这些条件。
Knowledge Landmarks 的思路是:
- 把知识表示为输入输出信息粒对
(A_i, B_i) - 把它们组织为 landmarks
- 再通过 regularizer 让模型在全局上更符合这些知识
4.7.2 这篇为什么很有启发性
它表达了一个很重要的判断:
知识不一定是方程,也不一定是硬逻辑。它也可以是“某类输入区域大概对应某类输出范围”的粒化知识。
这一步很关键,因为它把 informed ML 从“严格规则注入”推进到“模糊但结构化的知识注入”。
4.7.3 这篇和前面两条线是怎么汇合的
它同时继承了两条主线:
来自 Survey / informed ML 主线
- 数据与知识联合建模
- 知识以显式形式进入训练
来自 Granular 主线
- 知识是信息粒
- 不是点值或精确公式
- 训练中存在数据项与知识项的平衡
所以这篇可以看成:
informed ML + granular knowledge 表达 的汇合点
4.7.4 这篇最值得抓住的结构
- 局部数据
- 数值精确
- 覆盖范围有限
- 全局知识 landmarks
- 更抽象
- 覆盖更广
- 允许模糊与多场景变化
- 增强损失
- 一部分拟合本地数据
- 一部分约束模型遵守知识 landmarks
这对你后面做自己的 toy project 非常友好,因为结构清楚、容易人为构造。
4.7.5 实验层面它想说明什么
论文的目标不是追逐通用 benchmark,而是说明:
- 在 physics-governed 任务中
- 即使数据只在局部区域可得
- 抽象知识也能帮助模型提升全局泛化
这和你未来自己做研究的思路是非常接近的。
4.7.6 它和 rough set 的关系
它们不在同一条直接链上,但有共鸣:
- 都重视 granules
- 都重视 uncertainty / abstraction
- 都不把知识只看成精确点值
不同的是:
- rough set 更偏数据处理与属性约简
- knowledge landmarks 更偏知识-数据联合学习
4.7.7 潜在复现
最小复现
做一个 1D 或 2D toy regression:
- 真函数只在局部区间采样
- 形成有限训练数据
- 手工构造几个 landmarks,例如:
- 当
x在某区间时,y应落在某范围
- 当
- baseline 用普通 MLP
- 再加 landmark regularizer
- 对比全局泛化
标准复现
- 设计两个不同质量的 landmarks
- 比较粒度大小、噪声水平和超参数对模型的影响
更高价值的延展
- 这篇非常适合和你自己的后续研究结合
- 因为 landmarks 很容易根据问题背景自己定义
为什么它适合拿给导师/师兄看
- 结构完整
- 实验可以做得小而清楚
- 同时有方法论味道和研究延展空间
4.8 Uncertainty Measurement for Hybrid Data Using KNN-Neighbourhood Rough Set Model: Application to Attribute Reduction Based on Overlap Degree
文件位置
这篇的角色
这篇不是神经网络逻辑约束主线上的核心论文,但它和“粒化、不确定性、属性约简”这条补充路线高度相关。
如果你的目标是先建立 informed ML 主线,它应该放在后面读;如果你未来的方向更靠近粗糙集、混合数据、属性选择,它的价值会更高。

截图解析:这页最重要的是作者对 neighbourhood rough set 局限的分析,以及为什么要引入 KNN 机制。它实际上是在解决传统 neighbourhood 关系不能很好区分边界对象和孤立对象的问题。
4.8.1 它到底在解决什么问题
核心问题是:
在混合数据系统中,怎样更合理地度量不确定性,并据此做属性约简?
作者指出:
- 传统 rough set 更适合离散/符号数据
- neighbourhood rough set 更适合处理数值数据
- 但固定半径 neighbourhood 仍然会有问题
- 对于边界对象、孤立对象,分类能力可能不稳定
于是作者引入:
- KNN rule
- neighbourhood rough set
- uncertainty measurement
- overlap-degree based attribute reduction
4.8.2 这篇最该抓住的点
- 它不是在做“知识注入神经网络”
- 它是在做“混合数据上的不确定性表达与属性约简”
- 它和 informed ML 的关系在于:
- granules
- uncertainty
- 数据结构理解
4.8.3 它和主线的关系
它不应该插在 Logic-net 和 DL2 中间。
更合理的位置是:
- 当你读完 Granular / Knowledge Landmarks 之后
- 再把它当成一个“数据级 granulation 与 uncertainty measurement”的补充视角
4.8.4 什么时候值得你认真读它
- 你需要做混合数据特征选择
- 你对 rough set 有后续计划
- 你想把 granulation 视角往预处理阶段推进
4.8.5 潜在复现
最小复现
- 找一个小型混合数据集
- 实现 KNN-neighbourhood 关系
- 设计一个简单 uncertainty measure
- 比较属性约简前后分类表现
标准复现
- 实现论文中的 UM 与 attribute reduction 过程
- 在多个数据集上对比
更高价值的延展
- 研究属性约简结果是否能反哺前面的 knowledge-based learning
- 也就是让 rough set 先做结构整理,再交给 informed ML 模型
5. 你应该怎样一篇篇地看:推荐阅读顺序
这里给出最适合当前阶段的阅读顺序。
第一轮:先搭框架,不追细节
- Survey
- Logic-net
- Semantic Loss
- DL2
第一轮目标不是完全吃透公式,而是建立下面三个判断:
- knowledge 可以怎么表示
- knowledge 可以加在哪里
- logic 这条线是怎样逐渐系统化的
第二轮:切换到 granular / knowledge-data 视角
- Granular Computing for ML
- From Fuzzy Rule-Based Models to Granular Models
- Knowledge Landmarks
第二轮要抓住:
- 为什么点预测不够
- 为什么需要 granule
- 为什么知识不一定是硬逻辑
第三轮:补充旁支
- Rough Set 论文
这时候再看它,就不会把它误当成主线核心,而会把它放在:
- uncertainty measurement
- feature reduction
- data-side granulation
6. 最适合你的渐进式复现路线
这里不是“能不能复现”,而是“应该按什么顺序复现”。
6.1 第一阶段:只做最小 toy reproduction
目标:
- 每篇只抓一个核心思想
- 不追大数据集
- 不追原论文全部实验
- 先把方法直觉变成代码
推荐顺序:
logic_net_toysemantic_loss_toydl2_toygranular_interval_toyknowledge_landmarks_toy
6.1.1 logic_net_toy
最小目标:
- 二维分类
- 一条简单规则
- teacher-student 蒸馏
你要学会的是:
- rule -> teacher -> student 的链条
代码入口:
6.1.2 semantic_loss_toy
最小目标:
- 多分类
- exactly-one constraint
- 小量标注 + 无标签样本
你要学会的是:
- “满足约束的概率质量”怎样进入训练
这个 toy 在整条逻辑主线里的位置:
- 它最适合接在
logic_net_toy后面,因为你已经看过“规则怎样进入训练” logic_net_toy更像rule -> teacher -> student,这里更像“直接在输出分布上定义约束损失”- 它是你从“规则蒸馏”过渡到“可满足输出空间约束”的关键桥梁
- 后面如果继续看
DL2,你会更容易理解为什么有人要把约束语言和训练接口系统化
建议的最小实现:
- 先造一个二维输入、4 类输出的小型 toy 数据集
- 模型输出使用 4 个独立
sigmoid - 监督部分使用 one-hot 标签上的
BCEWithLogits - 无标签部分只对输出分布加 semantic loss
- 先只实现一条最简单的
exactly-one(y1, y2, y3, y4)约束 - 最少保留两组对照:
- baseline:只用 one-hot
BCEWithLogits - semantic-loss:监督项 + semantic loss
- baseline:只用 one-hot
当前目录结构:
repro/03_semantic_loss_toy/
README.md
notes.md
config.py
data.py
constraints.py
model.py
trainer.py
experiment.py
run.py
results/
每个文件建议负责什么:
README.md:说明 toy 任务、约束、运行命令、结果文件notes.md:把论文里的 semantic loss 公式和直觉翻译成你自己的话config.py:超参数、类别数、无标签比例、约束权重data.py:生成标注数据和无标签数据constraints.py:实现exactly-one、at-least-one这类 semantic lossmodel.py:最小 MLP 分类器trainer.py:联合优化监督 loss 和 semantic lossexperiment.py:单次实验封装、画图、存指标run.py:命令行入口
当前实现状态:
- 已落地目录:
repro/03_semantic_loss_toy/ - 当前状态:最小可运行版本已经完成,包含
baseline/semantic-guided对照 - 当前支持的约束集:
exactly_one、at_least_one、exactly_two_bad - 实现来源上,确实是从
logic_net_toy的训练组织方式平移过来的 - 复用建议:
- 复用
logic_net_toy的训练循环、绘图风格、结果落盘方式 - 把原来的 rule distillation / rule regularizer 替换成 semantic loss
- 把原来的二分类任务改成多分类任务
- 复用
潜在可复现点:
- 最小复现:
- 只做
exactly-one,先验证 semantic loss 数值和训练曲线是正常的
- 只做
- 标准复现:
- 加入少量标注 + 较多无标签,对比 baseline 与 semantic loss 的决策边界
- 扩展复现:
- 再加
mutual exclusion、implication、group constraint - 增加错误约束对照,观察它对 accuracy、校准性、边界形状的影响
- 再加
推荐实施顺序:
- 先把一个 4 类 toy 数据集上的纯监督 baseline 跑通。
- 在
constraints.py里只实现最简单的exactly-onesemantic loss。 - 先只在无标签样本上启用 semantic loss,确认 loss 曲线和指标都合理。
- 再增加错误约束对照,观察错误知识如何扭曲输出分布。
- 最后再补 sweep,例如扫
lambda_semantic、无标签比例、错误约束比例。
代码入口:
6.1.3 dl2_toy
最小目标:
- 小 MLP
- 一个 declarative constraint
- 跑通 query 或 train 其中之一
你要学会的是:
- 约束语言和系统接口
这个 toy 在整条逻辑主线里的位置:
- 它应该放在
semantic_loss_toy后面,因为这时你已经知道“逻辑可以变成训练信号” DL2进一步回答的是:如果约束类型更多、形式更统一、接口更系统,应该怎么组织- 它的重点不只是“再加一个 loss”,而是“约束如何表达、如何传给系统、如何用于训练或查询”
- 所以它是从“单个技巧”走向“统一框架”的那一步
建议的最小实现:
- 选一个二维 toy 数据集或一个极小 MLP
- 先只做一条 declarative constraint,不要一开始就搞多条复杂约束
- 优先跑通
query或最小train中的一个 - 适合的约束例子:
- 如果
x1 > x2,则class_1的 logit 应高于class_0 - 或者对小扰动前后,输出应满足单调性 / 不变性
- 如果
建议目录(待创建):
repro/04_dl2_toy/
README.md
notes.md
config.py
toy_problem.py
dl2_bridge.py
run_query.py
run_train.py
experiment.py
results/
每个文件建议负责什么:
README.md:明确你到底复现的是DL2的哪个最小子问题notes.md:整理论文里的 constraint language、training、querying 三部分config.py:任务规模、约束权重、训练步数等超参数toy_problem.py:生成样本、标签、扰动输入dl2_bridge.py:把 toy 问题和本地DL2接口接起来run_query.py:先跑最小查询实验run_train.py:再跑最小训练实验experiment.py:统一保存结果、图和指标
本地代码参考入口:
dl2-master/dl2-master/README.mddl2-master/dl2-master/training/README.mddl2-master/dl2-master/querying/README.md
待实现入口:
- 计划目录:
repro/04_dl2_toy/ - 当前状态:主文档先保留成结构完整的待实现小节,代码还没有正式开始
- 最稳妥的实现策略:
- 先做
query-only最小版本,把接口读明白 - 再做
train版本,把约束真正接进优化过程 - 不建议一开始就复刻原仓库的全功能实验
- 先做
潜在可复现点:
- 最小复现:
- 只跑一个最简单的 constraint query,确认约束能被系统正确解释和执行
- 标准复现:
- 跑一个最小 train case,比较有无约束时的性能或约束满足率
- 扩展复现:
- 尝试不同类型约束,如单调性、局部鲁棒性、类别关系
- 对比
DL2风格约束和semantic loss风格约束在实现难度与解释性上的差异
推荐实施顺序:
- 先把本地
DL2的README、training、querying三个入口读通。 - 只挑一个最简单的 toy 约束,先做
query,不要先碰完整训练。 - 把 query 的输入、约束表达、输出解释都自己讲清楚。
- 再补一个最小
train版本,把约束纳入训练循环。 - 最后再考虑要不要包装成和前两个 toy 一样的轻量项目结构。
6.1.4 granular_interval_toy
最小目标:
- 回归任务
- baseline 点值
- granular 版输出区间
你要学会的是:
- 为什么一个区间往往比一个点更诚实
6.1.5 knowledge_landmarks_toy
最小目标:
- 局部数据
- 全局 landmarks
- 数据项 + 知识 regularizer
你要学会的是:
- 如何用模糊但结构化的知识帮助全局泛化
代码入口:
6.1.6 当前已落地 toy 的读代码顺序总导航
如果你是第一次系统看代码,推荐总顺序:
logic_net_toysemantic_loss_toyknowledge_landmarks_toy
这样排的原因是:
logic_net_toy最容易先看清rule -> teacher -> studentsemantic_loss_toy正好接着理解“知识不经过 teacher,而是直接进 loss”knowledge_landmarks_toy再往后看“局部数据 + 全局知识 regularizer”这条更像研究原型的路线
如果你只想先抓每个 toy 的主干,不想一上来读所有文件,建议这样读:
logic_net_toy
- 先看 README
- 再看 run.py
- 再看 experiment.py
- 然后优先看 rules.py 和 trainer.py
- 最后看 data.py、model.py、logic_net_toy_代码逐行解析.md
semantic_loss_toy
- 先看 README
- 再看 run.py
- 再看 experiment.py
- 然后优先看 constraints.py 和 trainer.py
- 最后看 data.py、model.py、semantic_loss_toy_代码逐行解析.md
knowledge_landmarks_toy
- 先看 README
- 再看 run.py
- 再看 experiment.py
- 然后优先看 landmarks.py 和 trainer.py
- 最后看 data.py、model.py、knowledge_landmarks_toy_代码逐行解析.md
6.2 第二阶段:做成能给导师和师兄看的项目
每个 toy 项目建议统一结构:
repro/
01_logic_net_toy/
02_knowledge_landmarks_toy/
03_semantic_loss_toy/
04_dl2_toy/
05_granular_interval_toy/
每个目录建议固定有:
README.md
run.py
config.py
notes.md
results/
README.md 最少写清楚这 5 件事:
- 我复现的是原论文里的哪一个最小思想
- 我怎么简化的
- baseline 是什么
- 加知识以后 loss 多了什么
- 结果说明了什么
6.3 第三阶段:再考虑正式复现
只有当 toy 真的跑顺之后,再考虑:
- 跑 DL2 本地仓库里的样例
- 做更规范的对比实验
- 加更多 ablation
- 把 granular / logic 两条线尝试结合
7. 如果后面代码要发给博导和师兄,你从一开始就应该注意什么
7.1 他们最可能问你的问题
- 你这个实验到底对应原论文的哪一部分?
- 你是真的理解了方法,还是只是照着抄?
- 你的简化为什么合理?
- 你的 baseline 是什么?
- 知识注入到底起了什么作用?
所以你每个复现都必须能清楚回答:
- 约束是什么
- 它加在什么位置
- 训练目标增加了哪一项
- 指标为什么改善
- 失败案例是什么
7.2 真正能让人觉得你做得扎实的,不是代码量
而是:
- 结构清楚
- README 写得清楚
- 图画得清楚
- baseline 合理
- 结论不夸大
7.3 哪几个项目最值得优先给别人看
优先级建议:
knowledge_landmarks_toydl2_toylogic_net_toysemantic_loss_toygranular_interval_toy
原因:
knowledge_landmarks_toy最像一个能继续长成研究的原型dl2_toy最像成体系的代码项目logic_net_toy最好讲semantic_loss_toy最能体现你对逻辑约束的理解granular_interval_toy最能体现你开始关注可信输出
8. 最后把整套论文压成一句话
这组论文其实在讲同一件事的逐步升级:
先让机器学习不仅从数据里学,还从规则和知识里学;再让这些知识不只是精确逻辑,还可以是模糊的、粒化的、带可信范围的结构;最后把这些知识真正做成可训练、可解释、可扩展的学习系统。
如果后面继续推进,最自然的下一步不是再写一份摘要,而是直接动手做第一个项目:
logic_net_toy- 或
knowledge_landmarks_toy
这两个最适合把“看懂论文”变成“真正开始做研究”。