0. 名称与角色确认
0.1 当前文档对应哪篇论文
- Paper: Informed Machine Learning: A Taxonomy and Survey of Integrating Prior Knowledge into Learning Systems
- File: taxonomy_survey_2021_tkde.pdf
0.2 它在七篇笔记里的角色
这篇 survey 不是在提出某一个新的 informed ML 方法,而是在给整套阅读路线提供统一坐标系。
它最重要的作用不是“记住有哪些论文”,而是先回答三件事:
- 知识从哪里来?
- 知识怎样表示?
- 知识进入学习系统的哪里?
如果没有这张母图,后面的 Logic-Net、Semantic Loss、DL2、granular computing、knowledge landmarks 很容易被读成彼此断开的技巧。
0.3 读这篇时最该带着的批评问题
读这篇时最该反复问的不是“作者列了哪些方法”,而是:
- 这个 taxonomy 有没有漏掉某些知识形式?
- 同一篇论文能不能同时落在多个格子里?
- “知识表示”和“知识注入位置”之间是不是存在天然耦合?
- 哪些路线现在文献多,只是因为好做,而不是因为最重要?
这几个问题,会直接影响你后面读单篇论文时是否有批评性视角。
Citation
- Paper: Informed Machine Learning: A Taxonomy and Survey of Integrating Prior Knowledge into Learning Systems
- File: taxonomy_survey_2021_tkde.pdf
这篇 survey 的核心任务
这篇文章不是在提出某一个新的 informed ML 方法,而是在做三件事:
- 给出 informed machine learning 的概念边界。
- 提出一个统一 taxonomy,描述“知识从哪里来、如何表示、如何进入学习系统”。
- 按照这个 taxonomy 对已有方法做整理,并指出每条路径的挑战与未来方向。
因此,读这篇 survey 时最重要的不是记具体模型名,而是先抓住它的分析框架。
图 1 精读:Informed Machine Learning 的信息流
图的作用
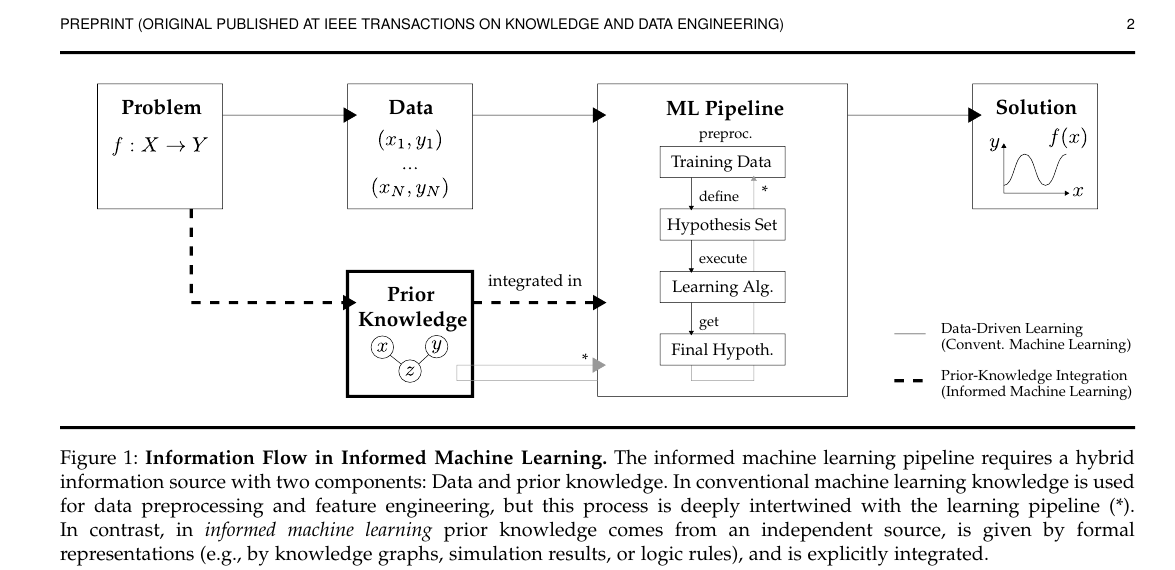
Figure 1 不是方法图,而是概念图。它回答的问题是:
informed machine learning 和普通 machine learning 的本质区别到底在哪里?
图中的基本结构
整张图有两条输入来源:
DataPrior Knowledge
它们共同进入 ML Pipeline,最终产生 Solution。
普通机器学习主要依赖样本数据:
- 从问题定义出发
- 收集训练数据
- 定义 hypothesis set
- 运行 learning algorithm
- 得到最终假设
f(x)
而 informed machine learning 在这个流程之外,再引入一个额外的信息源:
- 该信息源不是直接从训练样本中统计出来的
- 而是来自问题本身、科学规律、世界知识、专家经验或人类反馈
- 并且要以某种可形式化的方式显式接入 pipeline
这张图真正强调的 3 个条件
作者对 prior knowledge 的要求其实很严格,不是“任何经验”都算:
-
独立来源 先验知识不是从当前训练数据中直接拟合出来的,而是来自外部。
-
形式化表示 知识必须能以机器可操作的方式表达,例如方程、规则、图结构、仿真结果、概率关系等。
-
显式集成 知识不是停留在研究者脑中,也不是只在特征工程里模糊使用,而是明确进入学习流程。
图中的 pipeline 该怎么理解
图里 ML Pipeline 里面有 4 个核心环节:
Training DataHypothesis SetLearning AlgorithmFinal Hypothesis
这里最值得单独记住的是 Hypothesis Set。
它不是“训练出来的最终模型”,而是:
- 模型允许落入的函数空间
- 模型结构和归纳偏置的集合
- 哪些解被允许、哪些解天然被排除
因此,先验知识有三种最典型的进入位置:
-
进入训练数据 例如用仿真生成额外样本。
-
进入 hypothesis set 例如把规则、图结构、对称性直接做成模型结构偏置。
-
进入 learning algorithm 例如把约束改写成 loss、regularizer 或训练规则。
这张图对我读论文的启发
以后看到一篇 informed ML 论文,首先不要急着问“它用了什么网络”,而是先问:
- 它的 prior knowledge 从哪里来?
- 它被表示成了什么形式?
- 它被注入到了数据、hypothesis set 还是 learning algorithm?
这 3 个问题其实就是后面 taxonomy 的骨架。
表 4 精读:Taxonomy Path 的读法
表的作用
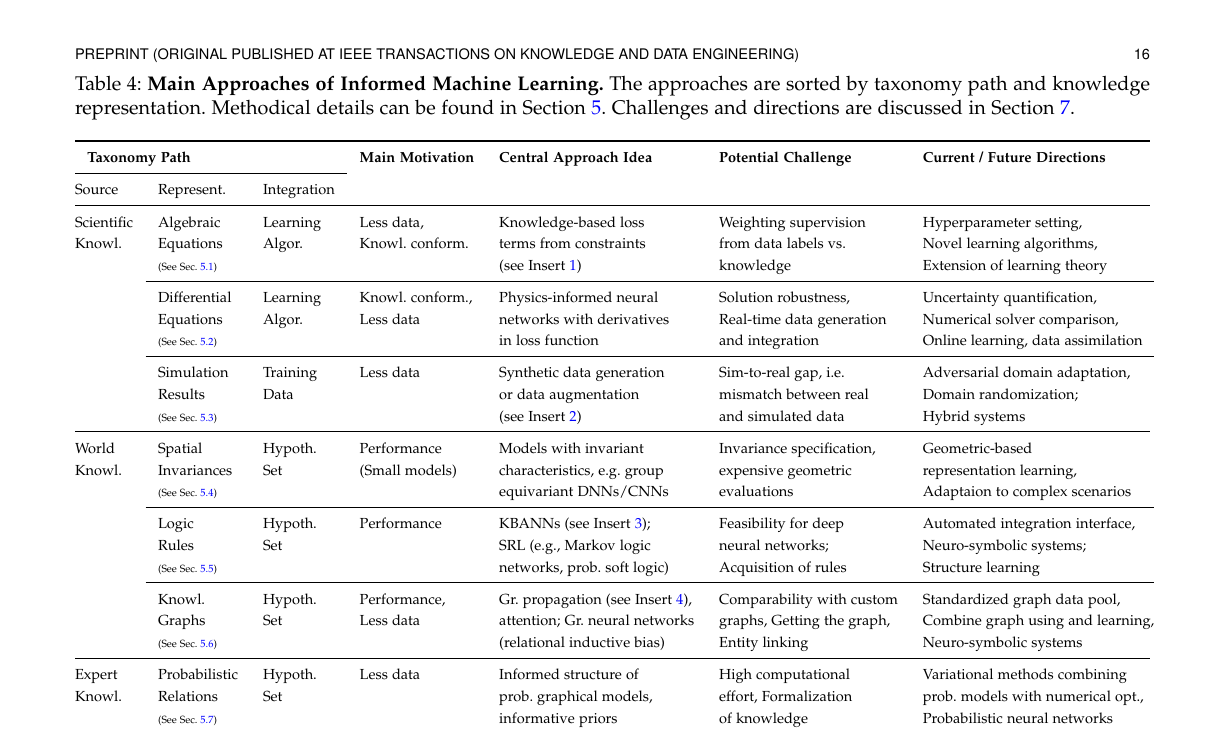
Table 4 是这篇 survey 最实用的一张总表。它不是在列方法名字,而是在列“知识注入路径”。
每一行都可以读成一个三段式:
Source -> Representation -> Integration
也就是:
- 知识从哪里来
- 知识被表示成什么
- 知识从哪个接口进入机器学习系统
在这三列之后,作者又补了:
Main MotivationCentral Approach IdeaPotential ChallengeCurrent / Future Directions
这就把“方法为何出现、通常怎么做、难点在哪、接下来往哪走”串起来了。
这张表最重要的阅读方式
不要把它当成静态分类表,而要把每一行读成一句完整的话。
例如:
-
Scientific Knowledge -> Algebraic Equations -> Learning Algorithm表示:知识来自科学规律,被表示为代数方程,并通过 loss / constraints 进入训练算法。 -
World Knowledge -> Logic Rules -> Hypothesis Set表示:知识来自人们对世界的规则性认知,被表示为逻辑规则,并进入模型结构或假设空间。 -
Scientific Knowledge -> Simulation Results -> Training Data表示:知识来自仿真系统,最终以样本或增强数据的形式进入训练集。
这样读,taxonomy 就从“分类记忆”变成了“方法理解工具”。
表 4 的逐行理解
1. Scientific Knowledge -> Algebraic Equations -> Learning Algorithm
这一类方法的主要动机是:
- 数据少
- 或者希望模型输出符合已有科学规律
中心思想是:
- 把知识写成代数约束
- 再把约束变成损失项或正则项
这类方法最典型的理解方式是:
不是只让模型去拟合标签,而是同时惩罚违反知识约束的预测。
主要挑战是:
- 数据监督和知识监督之间的权重怎么平衡
这也是很多 informed loss 方法最后都要调很多超参数的原因。
2. Scientific Knowledge -> Differential Equations -> Learning Algorithm
这一行对应的就是 physics-informed neural networks 这一大类方法。
中心思想是:
- 模型不仅要拟合观测数据
- 还要让模型的导数满足某个微分方程
它比一般代数约束更强,因为:
- 约束对象不是静态变量关系
- 而是函数及其导数的关系
作者强调的关键难点包括:
- 解的鲁棒性
- 实时数据的接入
- 与经典数值求解器的比较
这说明 PINNs 不是“只要加上 PDE loss 就一定更好”,而是要和数值分析传统认真对比。
3. Scientific Knowledge -> Simulation Results -> Training Data
这一类不是把知识直接做成 loss,而是先把知识通过仿真系统“展开”为数据。
因此它进入的是 Training Data,不是 Learning Algorithm。
常见形式包括:
- synthetic data generation
- data augmentation
- simulator-generated labels
它的关键挑战是 sim-to-real gap:
- 仿真数据和真实数据不一致
- 导致模型在模拟环境里好用,到了真实场景失效
因此未来方向常落在:
- domain adaptation
- domain randomization
- hybrid systems
4. World Knowledge -> Spatial Invariances -> Hypothesis Set
这里的知识是:
- 平移不变
- 旋转不变
- 群作用下的不变性 / 等变性
这类知识不是靠额外监督告诉模型的,而是直接被编码到模型结构里。
所以它进入的是 Hypothesis Set。
一句话理解:
不是训练后逼模型学会不变性,而是从一开始就只允许模型在满足这种几何规律的结构中学习。
这类方法的重要意义在于:
- 它往往能用更小模型达到更好泛化
- 因为结构偏置本身就减少了无效搜索空间
5. World Knowledge -> Logic Rules -> Hypothesis Set
这一类是 informed ML 中很重要的一条线,也是 neuro-symbolic 的核心接口之一。
作者提到的代表路径包括:
- KBANN
- Statistical Relational Learning
- Markov logic networks
- probabilistic soft logic
这里的重点是:
- 逻辑规则不只是一个训练时的 penalty
- 它还可以被映射为网络结构、推理结构或可行假设空间的一部分
关键挑战有两个:
- 深度网络场景下的可扩展性
- 规则本身从哪里来
第二点非常关键,因为真实任务里规则常常不是现成给好的,而是需要进一步做 structure learning。
6. World Knowledge -> Knowledge Graphs -> Hypothesis Set
这一类把关系知识表示成图。
它的核心思想通常是:
- 用图传播、注意力机制或图神经网络
- 把实体之间的关系结构作为 relational inductive bias 注入模型
这一条路线特别适合理解为:
图不是普通附加特征,而是“谁和谁有关、关系如何传播”的结构先验。
挑战主要在于:
- 图往往是定制的,不同论文难比较
- 图本身可能不完整
- entity linking 很难
所以作者提出的重要方向包括:
- 标准化图资源
- 图使用与图学习结合
- 更强的 neuro-symbolic integration
7. Expert Knowledge -> Probabilistic Relations -> Hypothesis Set
这里的 prior knowledge 不是规则硬约束,而是专家给出的概率关系、结构依赖或 informative priors。
这类方法常见于:
- probabilistic graphical models
- Bayesian priors
- variational approaches
其核心逻辑是:
- 先不要把知识理解成“必须满足”
- 而是理解成“某些结构或参数更可能出现”
它的主要困难是:
- 计算成本高
- 专家知识的形式化不容易
8. Expert Knowledge -> Human Feedback -> Learning Algorithm
这一路线说明:
- 人的反馈本身也可以是 prior knowledge
- 但它通常不是静态结构,而是进入训练过程
所以它更常进入 Learning Algorithm,而不是 Hypothesis Set。
作者列出的典型形式包括:
- HITL reinforcement learning
- explanation alignment
- visual analytics / interactive machine learning
这里的难点非常现实:
- 人的反馈慢
- 人的直觉难形式化
- 评价方式也不稳定
两张图合起来看,survey 的真正框架是什么
Figure 1 给出概念框架:
- informed ML = data + independently available prior knowledge
Table 4 给出操作性框架:
SourceRepresentationIntegration
也就是说,这篇 survey 真正想建立的不是“方法列表”,而是一个分析坐标系:
- 先判断知识来源。
- 再判断知识表示。
- 再判断它进入 pipeline 的位置。
- 最后分析它的动机、方法、挑战和未来方向。
适合记忆的简化版结论
可以把这篇 survey 压缩成下面 4 句话:
- informed ML 的本质不是“有经验”,而是“有独立来源、可形式化、可显式集成的先验知识”。
- 任何方法都可以用
Source -> Representation -> Integration来定位。 - 科学知识更常进入
Learning Algorithm,世界知识更常进入Hypothesis Set,仿真知识更常进入Training Data。 - 这篇 survey 的价值不在于提供统一模型,而在于提供统一读法。
读后可继续追问的问题
- 哪些知识表示之间可以互相转换,例如规则、图、概率关系?
- 同一种知识放进
Hypothesis Set和放进Learning Algorithm,效果有何本质区别? - 当数据与知识冲突时,系统应优先信谁?
- informed ML 与 neuro-symbolic learning、physics-informed learning、causal learning 的边界分别在哪里?
Section 4 精读:taxonomy 不是静态分类表,而是导航图
这一节在整篇 survey 里的位置
Section 4 的作用不是列举方法细节,而是把作者在文献调查中反复看到的模式抽象成一个统一框架。
换句话说:
- Section 2 解决“什么叫 informed ML”
- Section 3 解决“这个 taxonomy 是怎么从 survey 中归纳出来的”
- Section 4 解决“taxonomy 本身到底包含哪些维度和元素”
- Section 5 才开始把具体方法按 taxonomy 往里放
所以如果读到 Section 5 时觉得方法很多、很散,通常不是方法本身太乱,而是 Section 4 还没有真正吃透。
taxonomy 的三条主轴
作者把 informed ML 的方法空间拆成 3 个维度:
Knowledge SourceKnowledge RepresentationKnowledge Integration
这三个问题分别对应:
- 先验知识从哪里来?
- 它以什么形式表达?
- 它进入机器学习流程的哪个环节?
这三条主轴里,作者其实最强调第二条:representation。
因为:
- source 更偏应用背景
- integration 更偏方法接口
- representation 则是两者之间真正的桥梁
也就是说,知识能不能被机器学习系统吸收,关键不只是“你有没有知识”,而是“这种知识被写成了什么样子”。
Knowledge Source:三分法不是领域划分,而是形式化程度划分
Section 4.1 把知识来源分成:
Scientific KnowledgeWorld KnowledgeExpert Knowledge
这三类最容易被误解成简单的“学科分类”,但作者真正想表达的是一种谱系:
- 从更正式、显式验证的知识
- 到较通用但 often implicit 的世界知识
- 再到更依赖经验和直觉的专家知识
所以这不是严格互斥的 ontology,而是一种实用划分。
作者也明确承认:
- 这些类别不完备
- 也不完全互斥
它们的作用主要是为了识别“常见知识注入路径”。
Knowledge Representation:taxonomy 的核心接口
Section 4.2 是整套 taxonomy 最关键的部分。
作者抽出了 8 类常见表示:
- algebraic equations
- differential equations
- simulation results
- spatial invariances
- logic rules
- knowledge graphs
- probabilistic relations
- human feedback
这里一个很重要的判断是:
作者并不是在追求“数学上最简洁的表示集合”,而是在保留文献里最常见、最贴近实践的表示方式。
这就是为什么:
- 微分方程单独列为一类,而不是并回 algebraic equations
- simulation results 也单独列为一类,而不是看成 equation solver 的输出
原因不在于它们不能互相转换,而在于它们对应的机器学习接口经常不同。
这 8 类表示可以按三组来记
第一组:科学规律型
- algebraic equations
- differential equations
- simulation results
这组通常服务于“让模型符合科学规律”或“用仿真补足数据”。
第二组:符号与结构型
- spatial invariances
- logic rules
- knowledge graphs
这组通常服务于结构偏置、关系建模、可解释约束。
第三组:不确定与交互型
- probabilistic relations
- human feedback
这组通常用于处理专家经验、直觉、不完整知识和人机交互。
这样记,比直接死背 8 个名词更稳。
Knowledge Integration:知识不是只能进 loss
Section 4.3 的价值在于把“知识进入模型”拆成 4 个位置:
Training DataHypothesis SetLearning AlgorithmFinal Hypothesis
很多人一提 informed ML,第一反应是“加一个 knowledge loss”。
这只是其中一类,而且只是 Learning Algorithm 这一栏。
作者想说明的是:
- 你可以用知识造数据
- 可以用知识限定模型空间
- 可以用知识修改训练规则
- 甚至可以在训练后用知识校验或修正最终输出
这里面最常见的两个位置
虽然 4 个位置都可能,但作者明确说大多数论文集中在两个中心环节:
Hypothesis SetLearning Algorithm
这和你的阅读体验也一致:
- 结构偏置类方法,经常把知识做进 architecture / graph / kernel / rule structure
- 约束优化类方法,经常把知识做进 loss / regularizer / constrained optimization
Figure 2 真正展示的不是 taxonomy 本身,而是 taxonomy + literature frequency
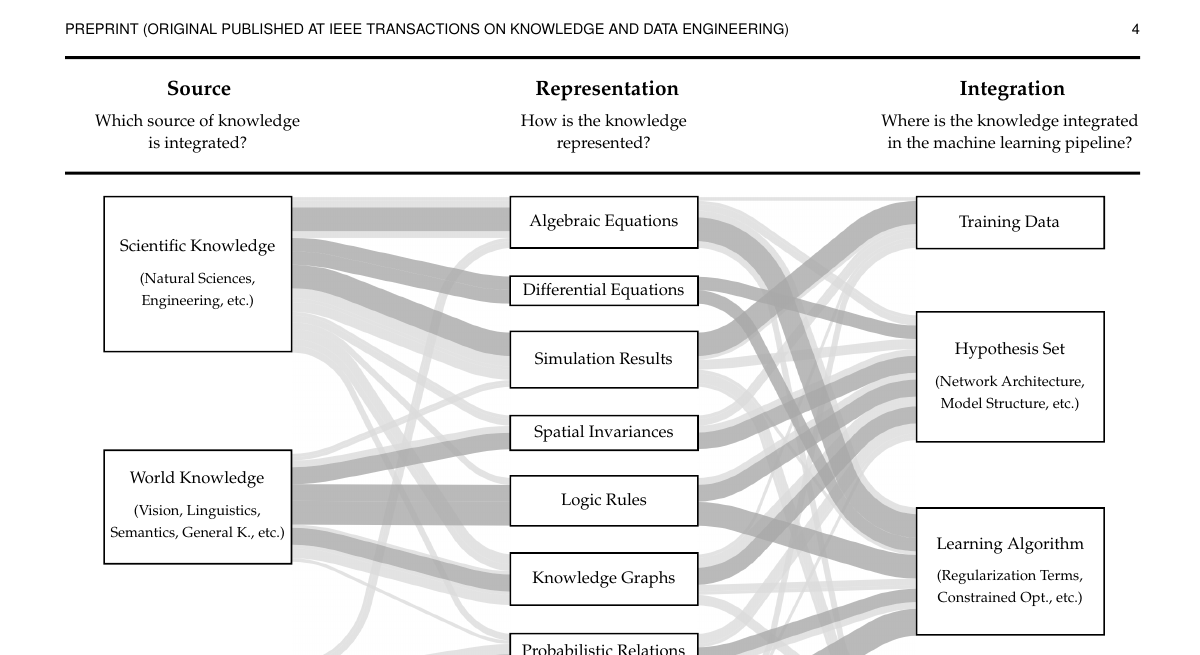
Figure 2 很容易被看成一张普通分类图,但其实它还叠了一层 survey 结果:
- 方块大小反映该元素在文献中出现的相对频率
- Sankey 路径宽度反映某条组合路径出现得多不多
- 深色路径表示作者认为的 main paths
这点很重要,因为这意味着:
这不是逻辑上所有可能的方法空间,而是“文献中已经被反复实践过的方法空间”。
因此它有两种用途:
- 给初学者当入门地图
- 给研究者当 baseline / gap 分析工具
taxonomy 的两个阅读方向
作者在 Section 4 里提了一个很容易被忽略但非常有用的观点:
- application-oriented 的人适合从左往右读
- method-oriented 的人适合从右往左读
也就是:
从左往右读
如果你手里先有知识来源,例如:
- 物理方程
- 医学图谱
- 语言规则
那么你会问:
- 它更适合用什么表示?
- 再从什么接口注入系统?
从右往左读
如果你先会一种方法,例如:
- constrained optimization
- graph neural networks
- teacher-student distillation
那么你会反过来问:
- 这种接口最适合接什么表示?
- 这些表示通常来自什么知识源?
这个视角非常适合做选题。
Section 4 的一个经验性结论:不同 source 会自然偏向不同 representation
作者在 Section 3.2 和 Section 4 的衔接里反复强调一个经验现象:
Scientific Knowledge经常走向 equations / simulationsWorld Knowledge经常走向 logic rules / graphs / invariancesExpert Knowledge经常走向 probabilistic relations / human feedback
这不是绝对规则,但说明知识的“来源气质”会影响它适合采用的形式。
这里最值得记的是:
informed ML 不是“先有统一方法,再把各种知识塞进去”,而是“不同知识天然偏向不同接口”。
Section 4 和 Table 2 / Table 3 的关系
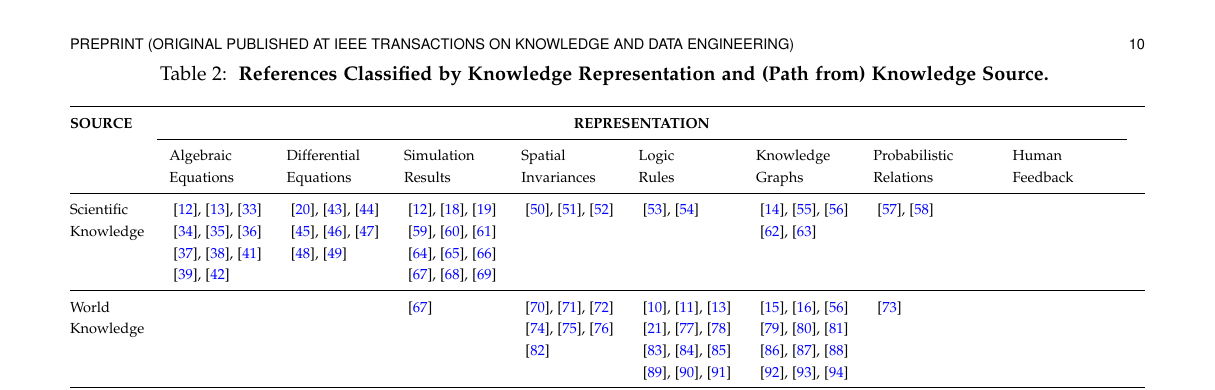
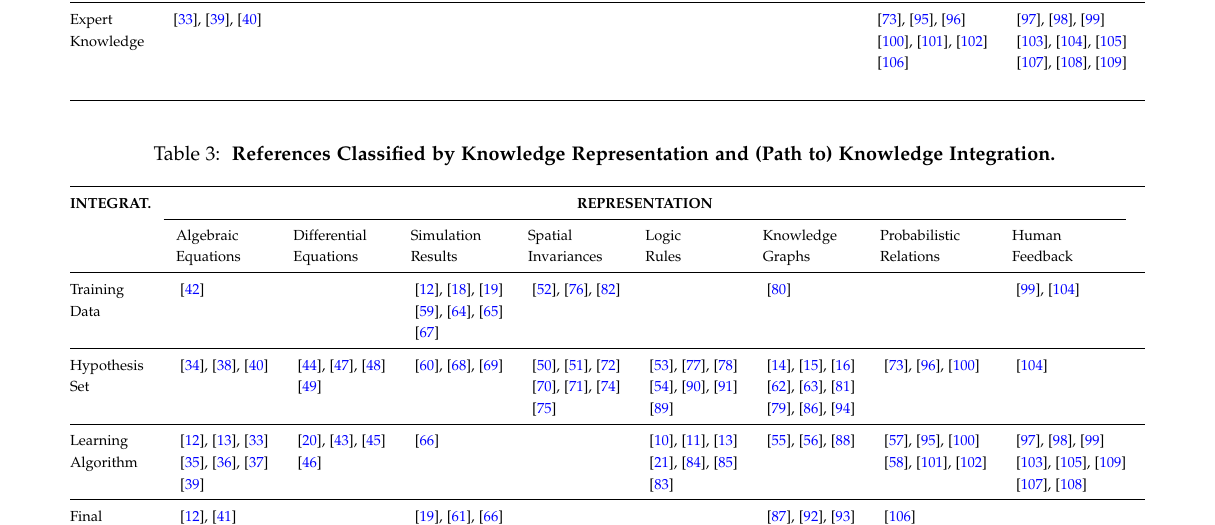
Section 4 给的是概念 taxonomy。
Table 2 和 Table 3 给的是 survey 中观察到的交叉分布。
可以这样理解:
- Section 4 告诉你“坐标轴是什么”
- Table 2 告诉你“source 和 representation 常怎么配”
- Table 3 告诉你“representation 和 integration 常怎么配”
所以这篇 survey 不是只给一张大图,而是给了三层信息:
- 概念框架
- 经验频率
- 代表性主路径
我对 Section 4 的一个总结
Section 4 的真正贡献不是发明了几个分类名字,而是把 informed ML 从“很多零散方法”重新组织成一个可以导航的方法空间。
可以压缩成一句笔记:
taxonomy 的意义不在于把论文归档,而在于把“知识如何进入学习系统”这件事拆成 source、representation、integration 三个可分析接口。
Section 5.5 精读:Logic Rules 这一路到底在做什么
为什么 logic rules 在这篇 survey 里地位很高
在所有表示类型里,logic rules 是最接近传统符号 AI 的一类。
它的重要性在于:
- 它保留了明确的语义关系
- 又能和学习系统发生多种接口
- 是 informed ML 与 neuro-symbolic learning 最直接的交汇点之一
换句话说,logic rules 不是一种边缘表示,而是一条非常核心的 informed ML 主线。
5.5.1:logic rules 最常来自 world knowledge
作者说 logic rules 可以来自多种来源,但最常见的是 World Knowledge。
这里给了几类很典型的例子:
-
物体属性规则
例如会飞且会下蛋的动物更可能是鸟。 -
物体关系规则
例如某些角色在游戏场景中经常共同出现。 -
语言规则
例如句子里出现but时,后半句情感更主导;或者 citation tag 的顺序约束。 -
社交 / 关系依赖规则
例如相互引用的作者更可能来自相近研究领域。
这些例子共同说明一件事:
logic rule 最适合表达“离散对象之间的关系性知识”。
它不像方程那样强调连续数值关系,而更强调:
- if-then 结构
- co-occurrence
- implication
- symbolic dependency
5.5.2:logic rules 主要有两种注入路线
作者在这一节里最重要的观察是:
- logic rules 主要进入
Hypothesis Set - 其次进入
Learning Algorithm
也就是说,规则要么改模型结构,要么改训练目标。
这两条路线虽然都叫“规则注入”,但本质上很不一样。
路线 A:把规则注入 Hypothesis Set
1. deterministic 路线:KBANN / neural-symbolic architecture
这一类方法最典型的代表就是 KBANN。
它的核心思想不是:
- 先训练一个普通网络
- 再用规则做后处理
而是:
- 直接把规则翻译成网络结构和初始权重
Insert 3 把这个过程拆成了 4 步:
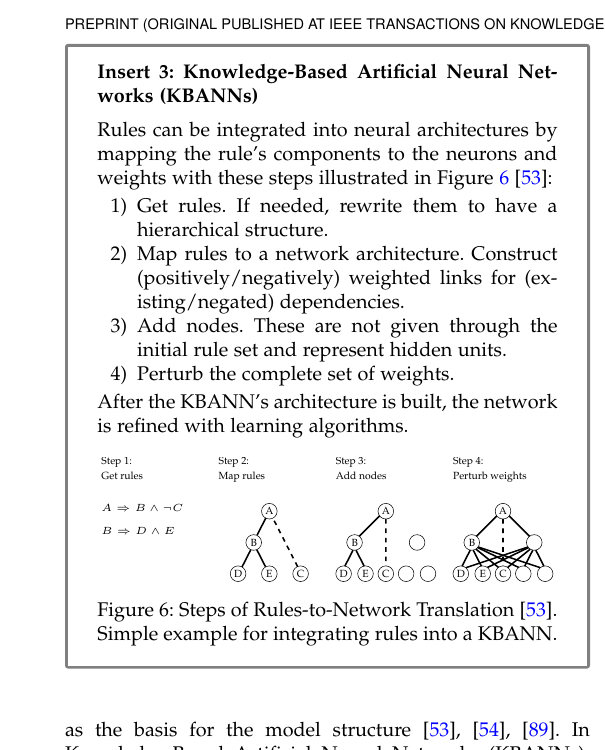
- 先拿到规则,必要时重写成层次化结构
- 把规则映射到网络结构
- 添加规则中没有显式给出的隐层节点
- 对整个权重做扰动,再继续学习
这里最值得记住的是:
KBANN 不是“规则做正则项”,而是“规则先塑造网络,再让数据细化网络”。
所以它体现的是一种强结构先验。
2. probabilistic 路线:SRL / MLN / PSL
另一类把规则放进 hypothesis set 的方式不是确定性结构,而是概率结构。
作者把这一路归到 statistical relational learning。
代表框架包括:
- Markov Logic Networks
- Probabilistic Soft Logic
这类方法的基本思想是:
- 一阶逻辑规则不再被当作必须严格满足的硬约束
- 而是被当作定义概率依赖关系的模板
也就是说,规则决定的是:
- 哪些随机变量相关
- 哪些联合配置更可能
- 满足规则会提升某些状态的概率质量
这一步非常关键,因为它把:
- symbolic rule
- probabilistic uncertainty
接到了一起。
所以这一路可以理解为:
规则不再只是在“真/假”层面起作用,而是在“更可能/不太可能”层面塑造假设空间。
路线 B:把规则注入 Learning Algorithm
这一类方法和上面最大的区别是:
- 模型结构本身不一定直接由规则决定
- 但训练目标会被规则约束
作者提到的典型做法是 semantic loss 一类方法。
核心思想是:
- 把逻辑规则转成一个可微分的惩罚项
- 再把它加进 objective function
作者举的几个技术接口包括:
- 用
t-norm把逻辑规则连续化 - 用一组公理化原则直接推出 semantic loss
这一路的意义在于:
规则被保留下来,但模型仍然可以保持常规深度学习结构,不必完全改写 architecture。
所以它通常更灵活,也更容易嵌入现有训练流程。
teacher-student 这一路为什么值得单独记
Section 5.5 里还专门提到了一类非常重要的变体:
- 先在 teacher 侧融入规则
- 再让 student 通过 imitation 学 teacher
这个思路很关键,因为它说明规则并不一定直接约束最终部署模型本身。
它也可以:
- 先约束一个更强、更“知识化”的 teacher
- 再通过 distillation 把知识迁移到 student
这正是 LogicNet 那类工作的典型思路。
所以从你的 toy 角度看:
logic_net_toy更接近 rules -> learning algorithm -> teacher-studentsemantic_loss_toy更接近 rules -> learning algorithm -> differentiable constraint
而 KBANN 则是另一条不同支路:
- rules -> hypothesis set -> architecture design
这三者都属于 logic rules 路线,但不是同一种方法。
logic rules 路线最容易被混淆的地方
logic rules 相关方法表面上都在“让模型遵守规则”,但实际上至少有三种不同层次:
-
结构层 规则塑造模型结构或可行假设空间,例如 KBANN。
-
概率层 规则定义随机变量之间的依赖模板,例如 MLN / PSL。
-
优化层 规则变成训练中的 differentiable penalty,例如 semantic loss。
如果不把这三层分开,logic-rule literature 很容易看成一锅粥。
作者对 logic rules 路线的判断
在 Section 7 的回看里,作者对 logic rules 给了两个核心挑战:
- 这条路在深层神经网络时代到底还能不能高效扩展?
- 如果规则不是现成给好的,那规则从哪里来?
第一个问题对应:
- 可扩展性
- 自动化知识注入接口
- 更现实的 neuro-symbolic systems
第二个问题对应:
- rule acquisition
- structure learning
也就是说,logic rules 路线的真正难点不只在“怎么用规则”,还在“规则本身怎么获得、怎么维护、怎么更新”。
我对 Section 5.5 的一个总结
logic rules 这一路不是单一方法族,而是一整类“把符号规则接到学习系统”的接口集合。
可以压缩成一句笔记:
logic rules 的本质价值不只是提供约束,而是把离散关系知识变成可计算的结构偏置、概率依赖或优化信号。
Section 5.6 精读:Knowledge Graphs 这一路到底在做什么
为什么 knowledge graphs 在 informed ML 里是一条独立主线
knowledge graphs 很容易被误看成 logic rules 的另一种写法,但作者把它单独拿出来,是有明确理由的。
logic rules 更强调:
- 命题关系
- 蕴含结构
- if-then 约束
knowledge graphs 更强调:
- 实体
- 关系
- 图上的连接结构
因此,graphs 的核心不是“规则是否成立”,而是:
世界中的对象如何相互关联,这种关联结构如何作为模型的 relational inductive bias 被利用。
这也是为什么 knowledge graphs 在这篇 survey 里不只是一个数据资源,而是一种独立的 knowledge representation。
5.6.1:graphs 最常来自 world knowledge,但不只来自 world knowledge
作者在 5.6.1 里先强调了一点:
- graph 是一种非常通用的建模工具
- 理论上可以表示多种结构化知识
但在 surveyed literature 里,最常见的来源仍然是 World Knowledge。
World Knowledge
作者给的典型例子很有代表性:
-
Visual Genome把自然图像中的对象属性和对象关系做成图。 -
ConceptNet把日常世界中的常识概念和关系做成图。 -
WordNet把词语之间的语义和词汇关系做成图。
这些例子共同说明:
graph 特别适合表达“实体之间有什么关系”,而不是“某条命题约束必须成立”。
这就是它和 logic rules 的根本区别。
对于语言任务尤其如此:
- rules 更像局部句法 / 语义约束
- graphs 更像概念网络、词汇网络、知识库结构
Scientific Knowledge
作者也强调 graphs 不只是常识图谱。
在科学领域里,graph 也可以直接表示结构化系统,例如:
- 物理系统中的 spring-coupled masses
- 医学中的 gene-protein interaction networks
- ICD 这类层级诊断体系
这说明:
graph 不是“自然语言知识库专用形式”,而是一种普适的关系结构表示。
只要对象和关系是核心,graph 就是自然接口。
5.6.2:knowledge graphs 几乎可以进入 pipeline 的所有位置
这一节最值得记住的观察是:
- knowledge graphs 在四个 integration 位置都出现过
- 但最突出的是
Hypothesis Set
这和 logic rules 的情况有些像,但 graph 路线的重点更偏“关系结构偏置”,而不是“规则约束”。
路线 A:graphs 进入 Hypothesis Set
这是作者认为最核心的一条路径。
1. graph neural networks 作为关系结构偏置
作者明确把 GNN 这类方法理解成:
- 模型结构本身就假设世界由相互关联的对象构成
换句话说,graph 进入 hypothesis set 的方式不是“加一条图约束”,而是:
- 直接让模型的运算方式围绕节点和边来组织
这就是 survey 里提到的 relational inductive bias。
可以把它理解成:
模型从一开始就不是把样本当成孤立向量,而是把它们当成图中的实体和关系来处理。
2. 显式把外部 knowledge graph 作为第二信息源接进模型
除了“模型本身是图结构”之外,还有一种更强的做法:
- 已有一个外部 knowledge graph
- 把它当成额外信息源接入网络
这时 graph 不只是 inductive bias,而是真正的第二知识来源。
Insert 4 给出的图像分类例子很好理解:
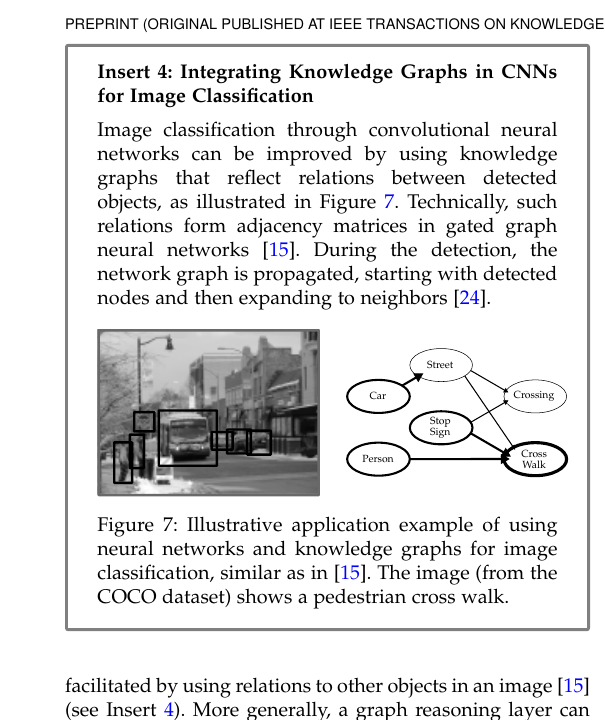
- 图像里先检测到一些对象
- 对象之间的关系由知识图谱给出
- 图传播从已检测节点向邻居展开
- 利用对象之间的语义关联帮助当前对象判断
例如在街景中:
personcrosswalkstop signstreet
这些对象单独看可能不够稳,但放到同一个关系图里,判断就会更强。
3. graph reasoning layer 的意义
作者还提到一种更通用的说法:
graph reasoning layer
它的思想是:
- 在已有神经网络某一层上再插一层图传播
- 通过知识图谱对表示进行增强
这说明 graph integration 不一定要求整个模型从头到尾都是 GNN。
更常见的现实情况可能是:
- 主干网络还是 CNN / Transformer / MLP
- 只是在中间插入一层 graph-based reasoning
这个思路在工程上很重要,因为它更容易和现有模型兼容。
路线 B:graphs 进入 Training Data
这一条在 graph literature 里非常重要,作者给的关键词是 distant supervision。
基本思想是:
- 用知识图谱中的实体关系去自动标注文本
- 从而生成训练样本
最朴素的做法是:
- 只要一句话里出现了一对图中已知相关的实体
- 就把它当成一个训练样本
但这种方法噪声很大,所以后续工作会用 attention 等机制去减轻噪声样本的影响。
这一条路线说明:
knowledge graph 不一定直接进入模型,它也可以先转化成弱监督信号,进入训练数据。
这点和 simulation results 有某种相似性:
- 都可以先把知识“展开”为可训练样本
只是 graph 展开出来的常常是自动标注或远程监督,而不是仿真数据。
路线 C:graphs 进入 Learning Algorithm
作者举了两类很值得记的做法。
1. graph Laplacian regularization
这是最经典的图正则化想法:
- 图上连得近的变量,在模型中也应表现得更相似
- 图上不连的变量,可以自由差异化
这类方法常见于:
- bioinformatics
- pathway information integration
它的本质是:
图结构被翻译成优化偏好,而不是直接翻译成模型结构。
2. knowledge graph 增强 embedding / language model 训练
另一类方法是在训练词向量或语言模型时,把图中的关系当成额外上下文。
例如:
- 利用图中相关词关系增强 word2vec 的上下文
- 利用知识图谱 embedding 辅助 ERNIE / BERT 这类模型训练
这说明 graph 进入 learning algorithm 时,常常扮演:
- 正则化来源
- 额外上下文来源
- 表示学习中的语义补充来源
路线 D:graphs 进入 Final Hypothesis
这一条很容易被忽略,但其实非常有 practical value。
作者举了几种代表性做法:
- 用知识图谱后处理 word embeddings
- 用街道地图图谱去验证自动驾驶中的语义分割结果
- 在目标检测里用图一致性来修正预测概率
这说明 graph 不一定非要参与训练。
它也可以在训练后承担:
- consistency checking
- result refinement
- knowledge-based validation
从安全和可信 AI 的角度看,这一条尤其重要。
knowledge graphs 和 logic rules 的关键区别
这两条路线很容易混,但最好强行分开记。
logic rules 更像:
- “如果 A 且 B,则 C”
- 重点在命题约束和逻辑可满足性
knowledge graphs 更像:
- “A 和 B 之间存在某种关系”
- 重点在实体网络和关系传播
所以:
- logic rules 更容易走向 semantic constraints、teacher-student、rule templates
- knowledge graphs 更容易走向 graph propagation、graph attention、GNN、entity linking
当然两者可以互相靠近,例如:
- 图中边可以隐含规则
- 规则也可以转成图结构
但在这篇 survey 里,它们被单独分类,是因为它们在机器学习里的接口重心不同。
作者对 knowledge graph 路线的判断
在 Section 7 里,作者对 knowledge graphs 的总结非常清楚。
主要挑战有三个:
-
不同论文用的图不统一,方法难比较 很多人用 ConceptNet、Visual Genome 之类模板图,但又会做大量自定义修改。
-
图本身难拿到 也就是作者说的
Getting the graph。 -
entity linking 很难 尤其当模型要把文本、图像中的实体和图谱中的节点对齐时,这一步经常是瓶颈。
相应的未来方向包括:
- 建立标准化 graph pool / benchmark
- 把 graph using 和 graph learning 结合起来
- 继续往 neuro-symbolic systems 发展
这里最值得记住的一点是:
knowledge graph 的难点往往不在“图网络怎么写”,而在“图从哪里来、图质量如何、图和当前任务对象怎么对齐”。
我对 Section 5.6 的一个总结
knowledge graphs 这一路的核心,不是简单“用图模型”,而是把关系结构当成第二信息源或结构偏置注入学习系统。
可以压缩成一句笔记:
knowledge graph 的本质价值,是把实体关系网络变成模型可利用的 relational structure,从而增强表示、训练或结果校验。
Logic Rules vs Knowledge Graphs 对照笔记
为什么这两条路线一定要单独对照
在 informed ML 文献里,logic rules 和 knowledge graphs 经常被一起归到“symbolic / structured knowledge”。
但如果不把它们认真拆开,就很容易发生两种误判:
- 把 graph 当成“换了壳子的规则”。
- 把 rule 当成“图上的一种边关系”。
这两种看法都不够准确。
更好的理解方式是:
- logic rules 解决的是“哪些命题关系应当成立”
- knowledge graphs 解决的是“哪些实体之间存在什么关系,以及这种关系结构如何传播”
所以它们虽然都属于结构化知识,但接口重心不同。
一句话区分
可以先记最短版本:
logic rules更像:约束knowledge graphs更像:结构
再展开一点:
logic rules的核心语义单位是命题、条件和蕴含。knowledge graphs的核心语义单位是实体、关系和连接模式。
对照 1:知识的基本单位不同
Logic Rules
基本单位通常是:
- 命题
- 谓词
- 逻辑关系
- if-then 结构
典型形式像:
A ∧ B -> C- “如果句子中出现 but,则后半句情感更重要”
- “如果对象会飞且会下蛋,则更可能是鸟”
这里的重点是:
- 条件成立时,结论应被支持或满足
Knowledge Graphs
基本单位通常是:
- 实体节点
- 关系边
- 局部邻域
- 全局连接结构
典型形式像:
(Mario, appears_with, Peach)(word, synonym_of, another_word)(gene_a, interacts_with, gene_b)
这里的重点是:
- 谁和谁相关
- 相关关系如何在图上组织
对照 2:它们让模型“学会什么”也不同
Logic Rules 想让模型学会:
- 满足某种逻辑约束
- 不违反某些离散规则
- 在推理上符合某种 symbolic consistency
所以它更偏:
- consistency
- constraint satisfaction
- rule-guided reasoning
Knowledge Graphs 想让模型学会:
- 利用对象之间的关系结构
- 借助邻居和路径信息增强表示
- 在关系网络中传播证据
所以它更偏:
- relational reasoning
- context enrichment
- structure-aware representation learning
对照 3:最常见的 integration 位置不同
Logic Rules
survey 里最常见的是:
Hypothesis SetLearning Algorithm
也就是:
- 规则塑造结构
- 或规则进入 loss / optimization
代表接口:
- KBANN
- MLN / PSL
- semantic loss
- teacher-student rule distillation
Knowledge Graphs
survey 里四个位置都出现,但最突出的仍然是:
Hypothesis Set
除此之外也常见:
Training DataLearning AlgorithmFinal Hypothesis
代表接口:
- GNN
- graph reasoning layer
- graph attention
- distant supervision
- graph Laplacian regularization
- knowledge-based validation
一句话看差异:
rules 更常“约束模型”;graphs 更常“重构模型看世界的方式”。
对照 4:典型方法族不同
Logic Rules 这一路常见方法
-
KBANN规则 -> 网络结构 -
MLN / PSL / SRL规则 -> 概率依赖模板 -
semantic loss规则 -> 可微约束项 -
teacher-student规则 -> teacher guidance -> student imitation
Knowledge Graphs 这一路常见方法
-
GNN / graph propagation图结构 -> relational inductive bias -
graph reasoning layer在已有主干网络中插入图传播 -
graph attention用图邻域增强表示或特征选择 -
distant supervision图关系 -> 自动标注 -> 训练数据 -
graph regularization图拉普拉斯等图约束 -> 学习算法 -
knowledge-based validation图一致性 -> 后验修正或结果校验
对照 5:最适合表达的知识类型不同
更适合用 Logic Rules 的场景
当你的知识天然长成下面这种样子时,rules 通常更自然:
- “如果……则……”
- “不能同时成立”
- “必须满足某个离散约束”
- “标签之间有排斥 / 蕴含 / 顺序关系”
- “解释必须满足某种可满足性结构”
典型任务感觉包括:
- 标签约束
- 逻辑推理
- 结构输出约束
- 弱监督中的规则模板
- sentiment / sequence tagging 里的符号规则
更适合用 Knowledge Graphs 的场景
当你的知识天然长成下面这种样子时,graphs 通常更自然:
- “谁和谁有关”
- “对象之间有多种关系”
- “要利用邻居、路径、局部上下文”
- “概念和实体构成网络”
- “需要基于关系传播额外证据”
典型任务感觉包括:
- 图像中的对象关系
- NLP 中的实体 / 概念网络
- 推荐 / 知识库问答
- 生物医学交互网络
- 任何“多实体、多关系、上下文传播”任务
对照 6:最容易踩的坑不同
Logic Rules 的主要难点
-
规则从哪里来
很多任务里规则并不是现成给定的。 -
规则如何 formalize
自然语言经验转成逻辑形式并不容易。 -
规则与数据冲突怎么办
数据噪声、知识噪声和不完备性都可能导致冲突。 -
规则如何 scalable
深层网络里,规则注入不一定稳定、高效。
Knowledge Graphs 的主要难点
-
图从哪里来
这正是 survey 里说的getting the graph。 -
图质量如何
图可能不完整、过时、稀疏或任务不匹配。 -
entity linking 是否可靠
输入对象能不能正确对齐到图节点,经常是关键瓶颈。 -
不同方法难比较
因为每篇工作往往都在自定义图资源。
对照 7:二者与可微学习系统的结合方式不同
Logic Rules 走向可微系统时
通常需要做的是:
- 把离散逻辑变成连续松弛
- 把 rule satisfaction 变成 loss
- 把规则模板映射为结构或概率项
也就是说,rules 进入神经网络时,常常要经历一个“离散 -> 可学习接口”的转化。
Knowledge Graphs 走向可微系统时
通常需要做的是:
- 把图变成 message passing 结构
- 把邻接关系变成 attention / propagation / regularization
- 把节点和边嵌入为连续表示
也就是说,graphs 本身更天然就是“结构”,更容易直接接入神经网络表示学习。
对照 8:二者不是对立的,而是可以配合
虽然二者不同,但在很多任务里可以自然组合。
一种常见的组合方式是:
- 用 graph 给出实体关系骨架
- 用 rules 规定哪些推理或输出是可接受的
也就是说:
- graph 负责“关系背景”
- rule 负责“推理约束”
再进一步:
- 图中的边类型可以诱导规则
- 规则也可以帮助筛选图中的有效关系
所以更准确的说法不是“rule vs graph 二选一”,而是:
当知识既有关系网络,又有符号约束时,二者往往应当分工合作。
一个选方法时非常实用的判断问题
如果你读到一篇论文,想快速判断它更属于哪一条路线,可以问 4 个问题:
- 这篇工作的知识核心是在表达“约束”,还是在表达“关系网络”?
- 模型更像是在“满足规则”,还是在“利用邻居和连接结构”?
- 主要接口是 loss / constraint,还是 propagation / attention / graph architecture?
- 如果把 graph 去掉或把 rule 去掉,模型失去的是“结构上下文”还是“逻辑一致性”?
这 4 个问题通常足够把论文定位清楚。
和你当前阅读路线的关系
从你现在这条路线看,这个对照尤其有用:
-
LogicNet更明显地属于 logic rules 路线,重点在 rules -> teacher/student -> learning algorithm。 -
Semantic Loss也属于 logic rules 路线,重点在 rules -> differentiable constraint。 -
Knowledge Graph相关工作 会更偏 relations / propagation / graph-enhanced representation,而不是逻辑可满足性本身。
这意味着你后面读图谱类论文时,不要再用“它的规则是什么”当第一个问题,而要改成:
- 它的实体和关系怎么定义?
- 图怎么进入模型?
- 图是在传播信息,还是在约束输出?
最后的压缩记忆
可以用下面这组最短对照记:
Logic Rules:命题约束、if-then、规则一致性、loss / architecture / probabilistic templateKnowledge Graphs:实体关系、图结构、邻域传播、GNN / attention / validation
再压缩成一句:
rules 更像“告诉模型什么不能错”,graphs 更像“告诉模型谁和谁有关”。
衔接理解:Section 4、5.5 和 5.6 应该怎么连起来
如果把前面的 Figure 1、Figure 2、Table 4,再加上这里的 logic rules 和 knowledge graphs 合在一起看,可以得到一个很清楚的层级:
- Figure 1 说 informed ML 的本质是“数据 + 独立来源先验”。
- Section 4 说这些先验可以用
Source -> Representation -> Integration来系统分类。 - Section 5.5 拿
Logic Rules做展开,展示符号规则怎样变成结构偏置或训练约束。 - Section 5.6 拿
Knowledge Graphs做展开,展示关系结构怎样变成图传播、图注意力、图正则或结果校验。
所以:
- Section 4 提供方法空间
- Section 5.5 和 5.6 提供两条典型 symbolic / relational 路线的展开案例
这也是为什么读 survey 时,先吃透 taxonomy,再分别读 logic rules 和 knowledge graphs,会顺很多。
适合记到脑子里的压缩版
Section 4
- taxonomy 不是静态分类表,而是 informed ML 的导航坐标系。
representation是连接应用知识和学习算法的中介接口。- source、representation、integration 三维联合起来,才能真正定位一个 informed ML 方法。
Section 5.5
- logic rules 是 informed ML 里最核心的符号知识表示之一。
- 规则可以改模型结构,也可以改训练目标,还可以定义概率依赖。
- KBANN、MLN / PSL、semantic loss / teacher-student 是三条不同层次的 logic-rule 路线。
Section 5.6
- knowledge graphs 是 informed ML 里最核心的关系结构表示之一。
- 图可以进入 training data、hypothesis set、learning algorithm 和 final hypothesis,但最常见的是 hypothesis set。
- graph propagation、graph attention、GNN、distant supervision、graph Laplacian regularization 和 knowledge-based validation 是这一路的关键接口。